A split-range control implementation method suitable for multivariable model predictive control
A multi-variable model and split-range control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem that PID is not suitable for coordinated control of multiple control loops, predictive control algorithm cannot be used directly, and PID control Poor device effect and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0066] The present invention will be explained in detail below in conjunction with the accompanying drawings.
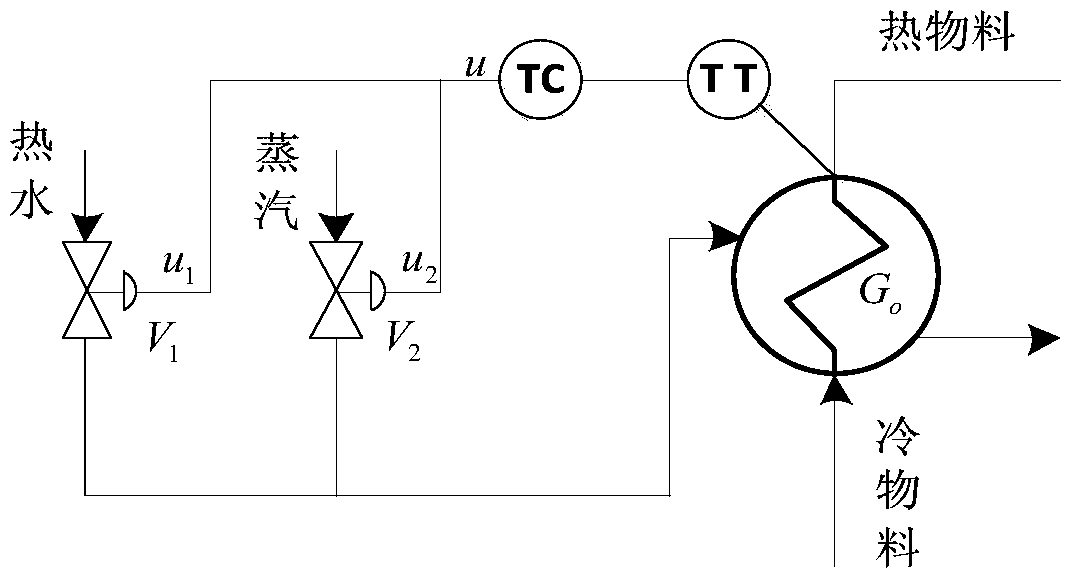
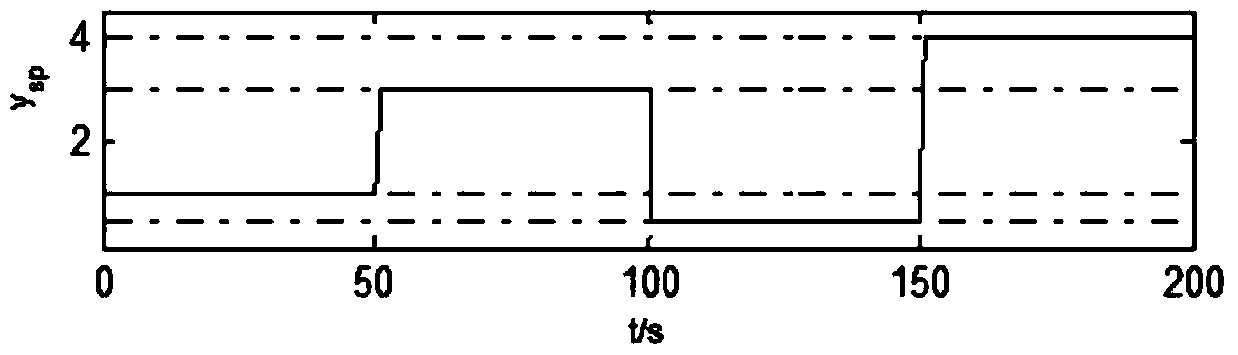
[0067] Split-range control refers to the control of two or more actuators by one output signal of the controller. Because the split-range control contains nonlinear characteristics, the model predictive control technology based on the principle of linear superposition cannot be used directly. The invention proposes a split-range control implementation method suitable for multi-variable model predictive control. In each linear interval of split-range control, a predictive model is established according to the different action combinations of each actuator, and the output of the controller is compared in each control cycle. The control signal value and the corresponding intermediate threshold value select the prediction model, and the dynamic matrix control algorithm is used to calculate the control increment and apply it to the corresponding actuator to perform the ac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com