

Robot for assisting minimally invasive surgery of pleuroperitoneal cavity
A minimally invasive surgery and robotic technology, applied in the field of robotics, can solve the problems of unstable image display of lesions and inability to provide stability for lesion tissue, and achieve the effects of ingenious structural design, reduced collision, and reduced space volume.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
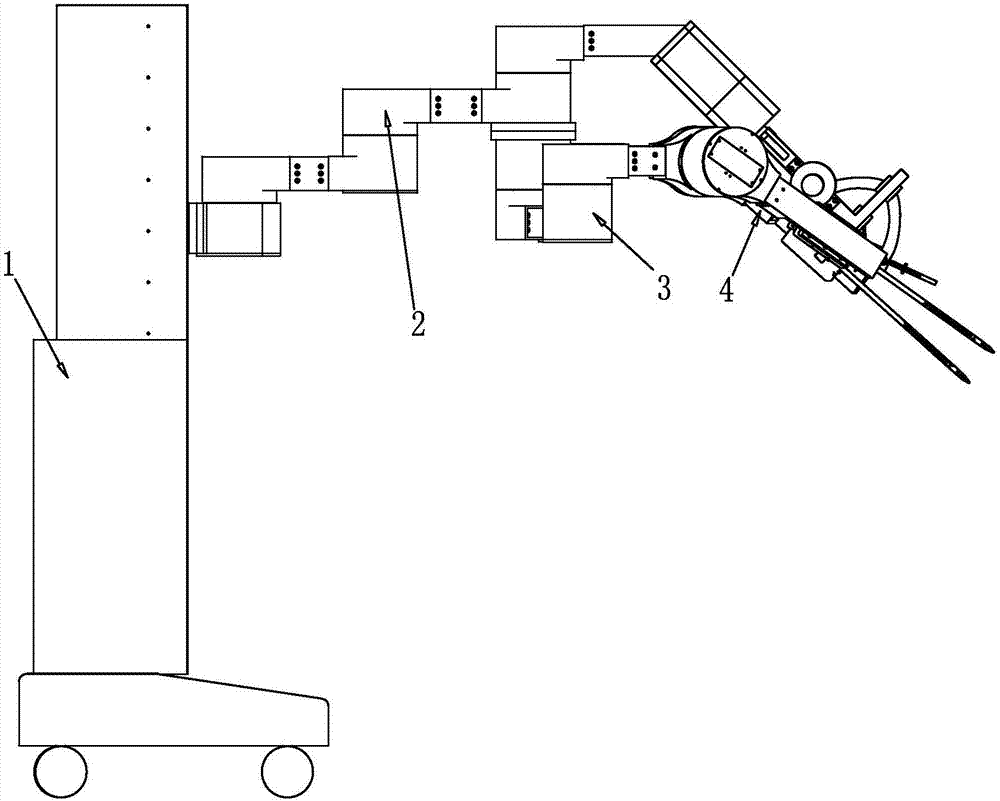
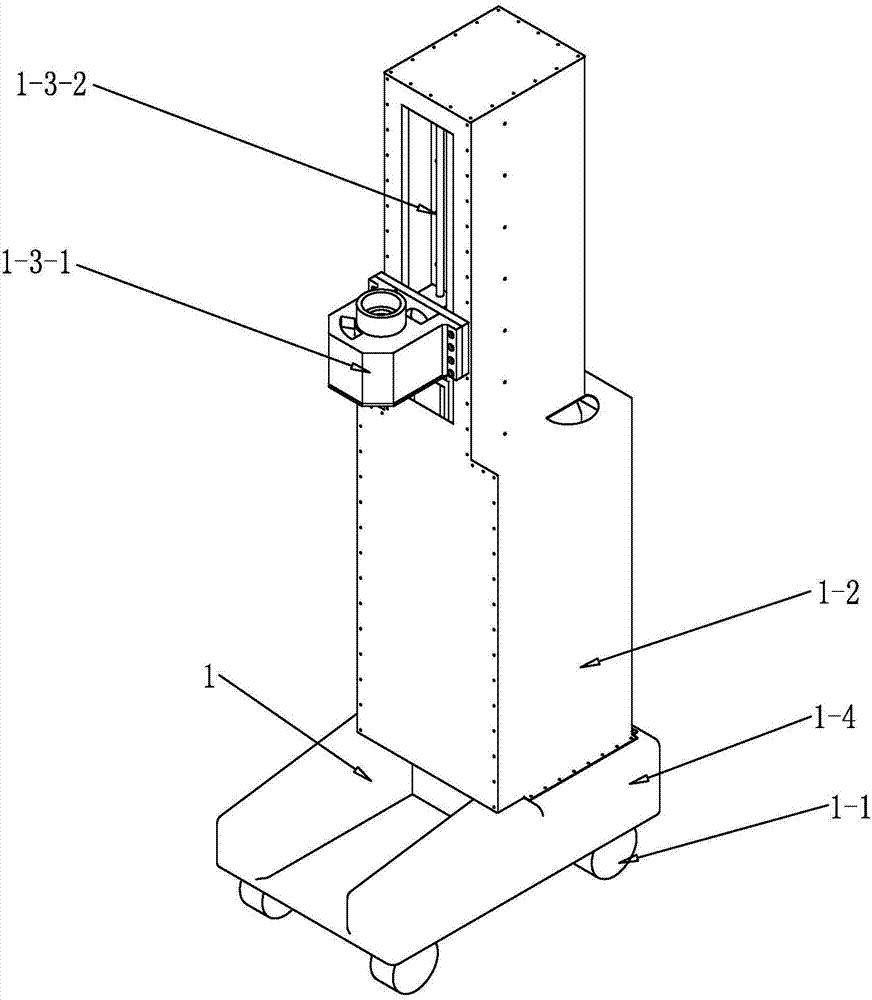
[0043] see figure 1 with figure 2 Explain that a robot for assisting minimally invasive thoracoabdominal surgery includes a base 1, a middle robotic arm 2 and a side robotic arm 3;
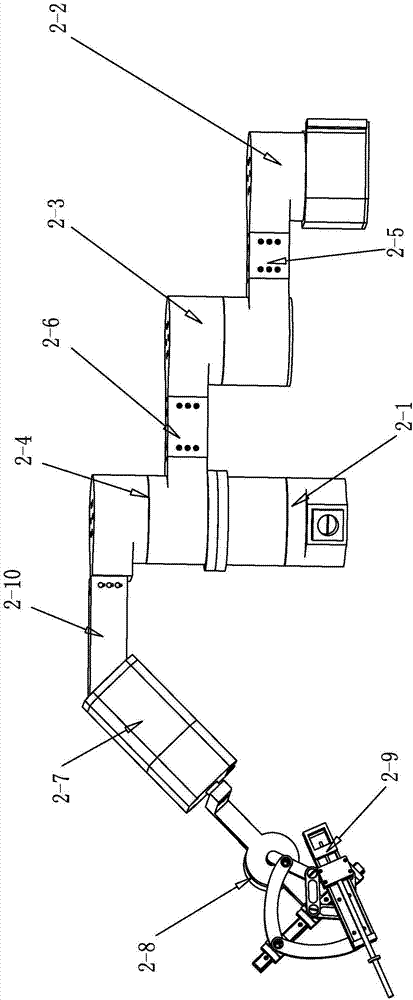
[0044] The intermediate mechanical arm 2 includes a positioning joint and an end effector for telecentric positioning and clamping of the endoscope;
[0045] The positioning joints include swing joint one 2-1, swing joint two 2-2, swing joint three 2-3 and swing joint four 2-4;
[0046] The swing joint 2-2 includes an upper support 2-2-1 and a locking pendulum measuring mechanism;
[0047] The swing joint three 2-3 includes an upper support three 2-3-1, a lower support three 2-3-2 and a locking pendulum measuring mechanism;
[0048] The swing joint 2-4 includes an upper support 2-4-1, a lower support 2-4-2 and a locking pendulum meas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More