

Hand-eye servo robot grabbing system and method based on depth learning and image segmentation technology
A technology of image segmentation and deep learning, which is applied in the field of robotics, can solve problems such as the limitation of the intelligent ability of robot visual servo grasping, and achieve the effect of strong practicability, meeting the needs of intelligent operation, and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described in detail below through specific embodiments in conjunction with the accompanying drawings.
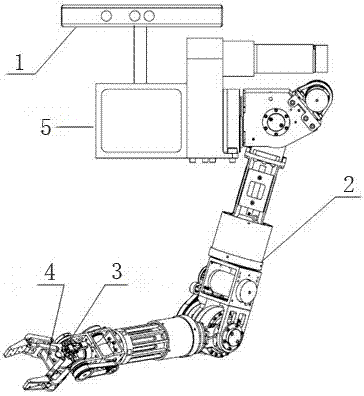
[0040] see figure 1 , figure 1 It is a schematic diagram of the robot and the visual servo system hardware used for scene target recognition and positioning. The hardware equipment used in the present invention includes a multi-axis mechanical arm 2, a stereo vision sensor 1, a color network camera 3, and a single-point laser measuring device. From the sensor 4, an embedded PC 5; the multi-axis mechanical arm 2 has seven degrees of freedom, which can be called a seven-degree-of-freedom mechanical arm 2, or a seven-axis mechanical arm 2, which is used for grabbing the target; The stereo vision sensor 1 is installed on the top of the mechanical arm 2 for the acquisition of RGB images and point cloud data; the color network camera 3 is installed at the middle position of the end joint of the mechanical arm 2 for the purpose of the o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More