

Beacon arranging and image processing method based on UAN (unmanned aerial vehicle) pose calculation
An image processing and unmanned aerial vehicle technology, applied in image data processing, computing, image analysis and other directions, can solve the problem that the design conditions of cooperative beacons are not strict enough, there is no suitable method for detection, extraction and matching of cooperative beacons, and pose solutions Algorithms are not well analyzed, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0177] The present invention is further described below in conjunction with embodiments, but the present invention is not limited to the following embodiments:
[0178] 1 beacon design
[0179] The vision guidance system designed in this scheme meets the guidance conditions shown in Table 1:
[0180] Table 1 Guidance conditions of vision guidance system
[0181]
[0182] In addition, the location data update rate during the landing process is 12HZ. To meet these requirements, it is necessary to select equipment through related analysis with imaging, measurement and calculation. First, select the imaging device by calculating the required image imaging accuracy, and then design the layout constraints of the ground beacon by analyzing the imaging changes during landing.
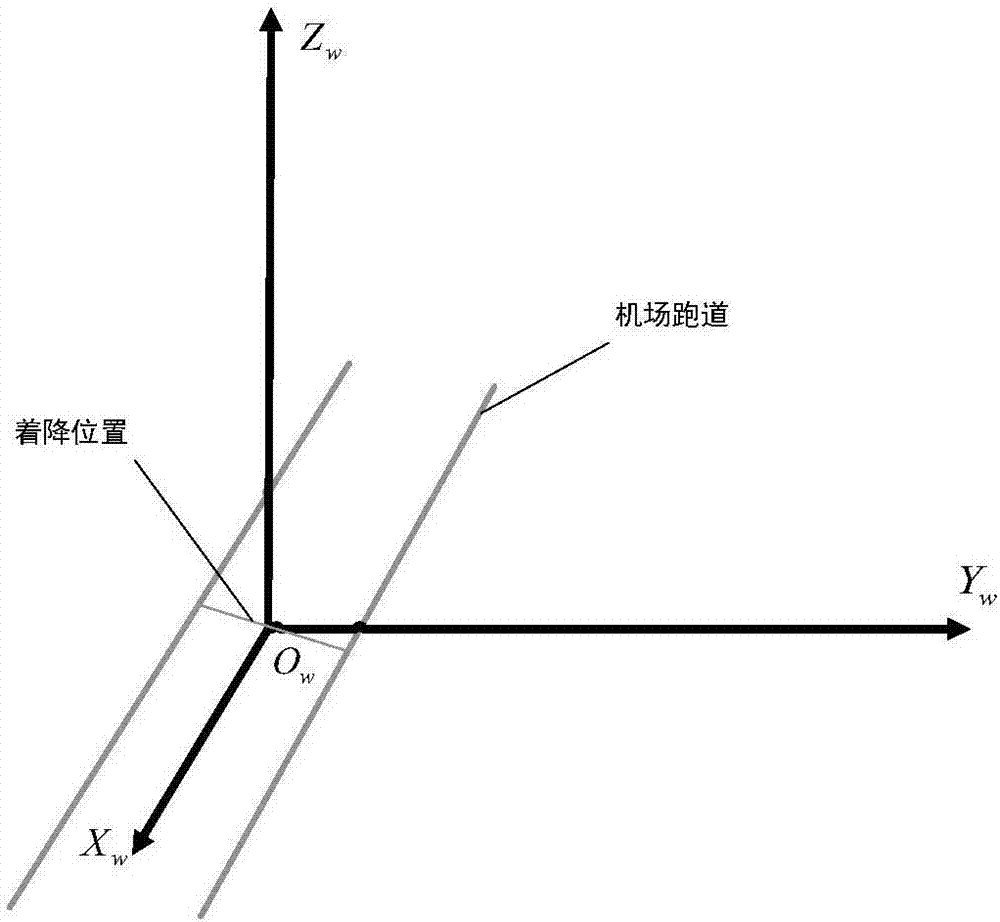
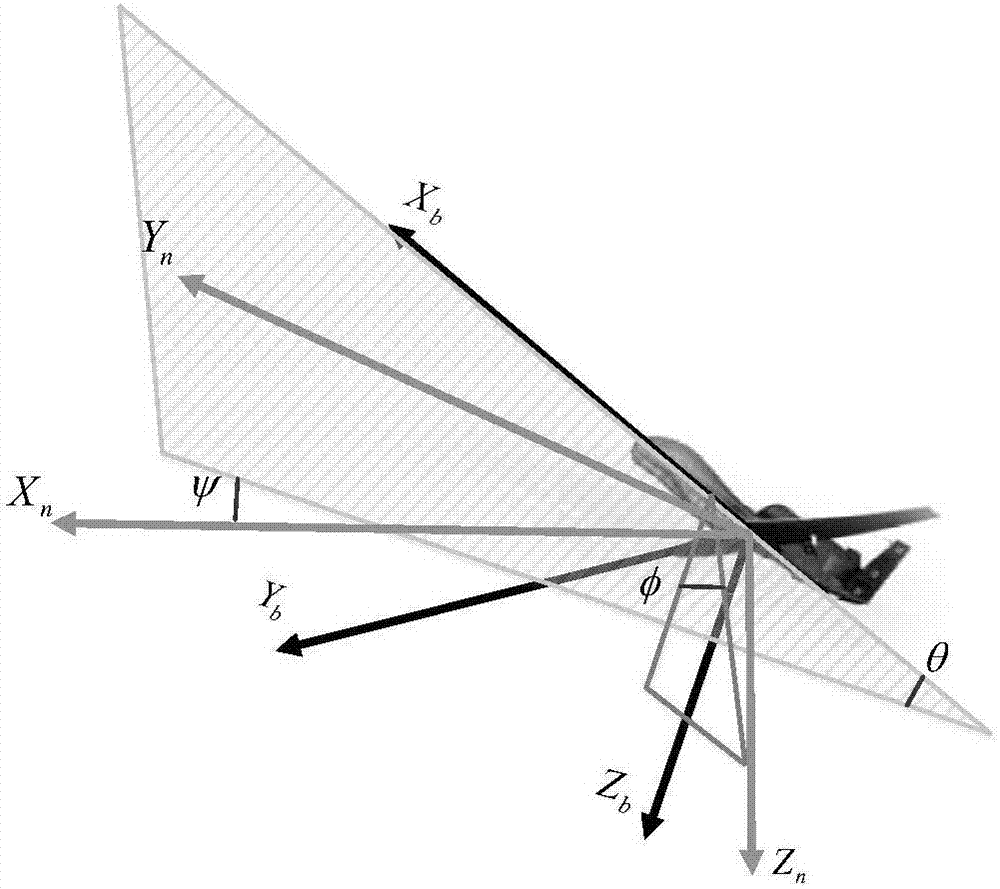
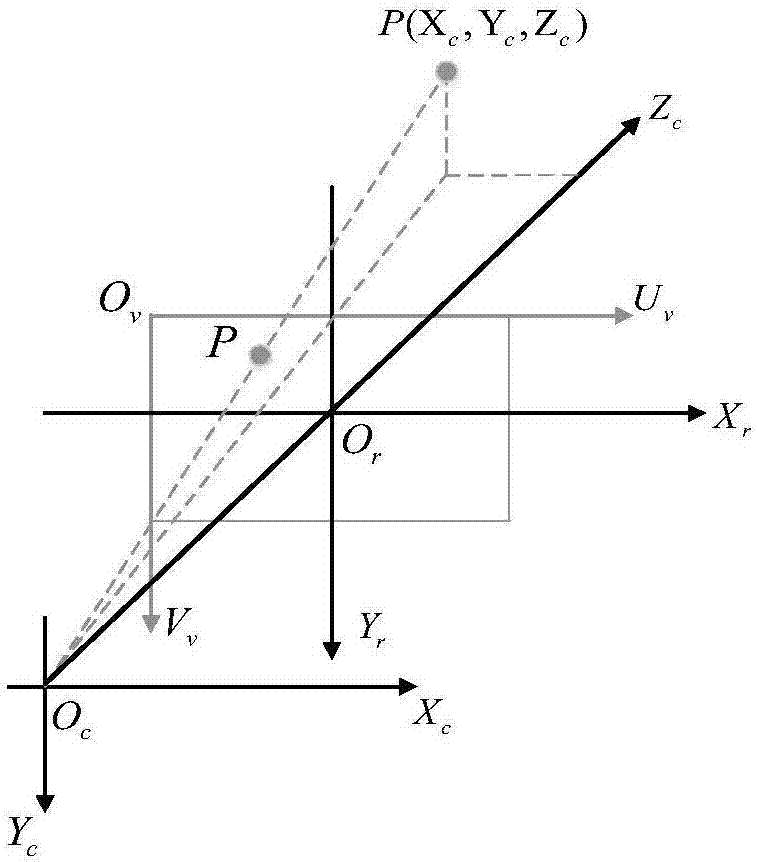
[0183] Coordinate system and aircraft attitude angle definition
[0184] For ease of description and calculation, the coordinate systems defined in this scheme are all right-handed systems. The coordinate system arrange...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More