

Terminal actuator for picking tomato fruit clusters and picking method thereof
An end effector and fruit technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of easily damaged fruit skin, low productivity, high cost, etc., and achieve the effect of compact device structure, reliable operation, and avoiding damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The present invention will be further described below in conjunction with drawings and embodiments. The technical features of the various implementations in the present invention can be combined accordingly on the premise that there is no conflict with each other.
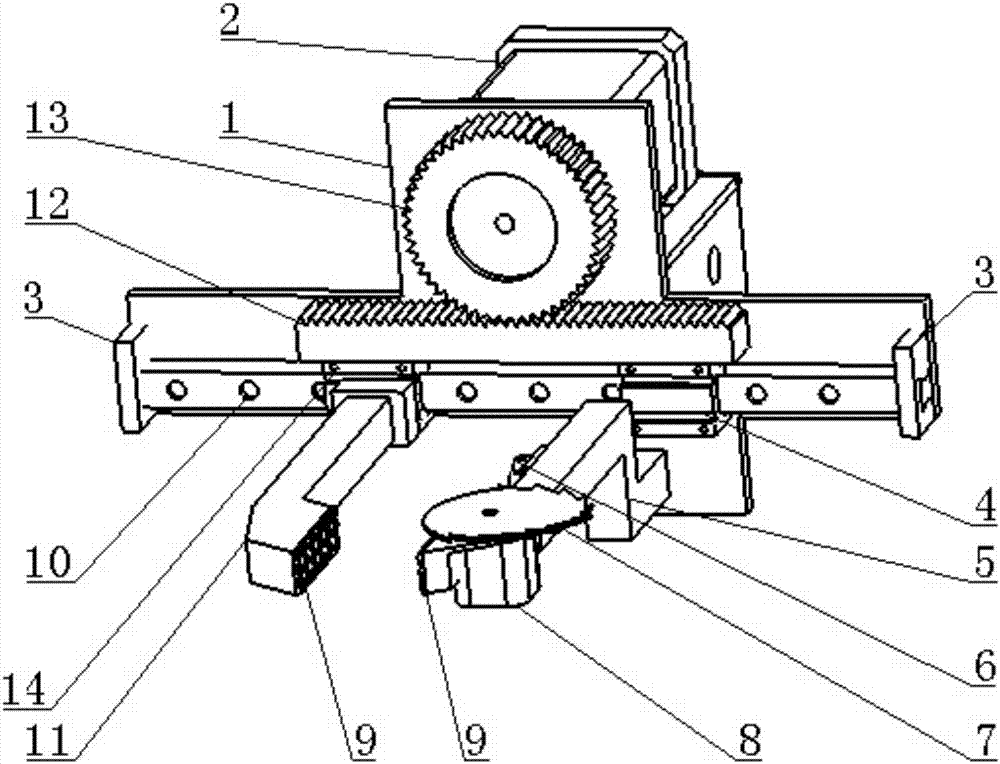
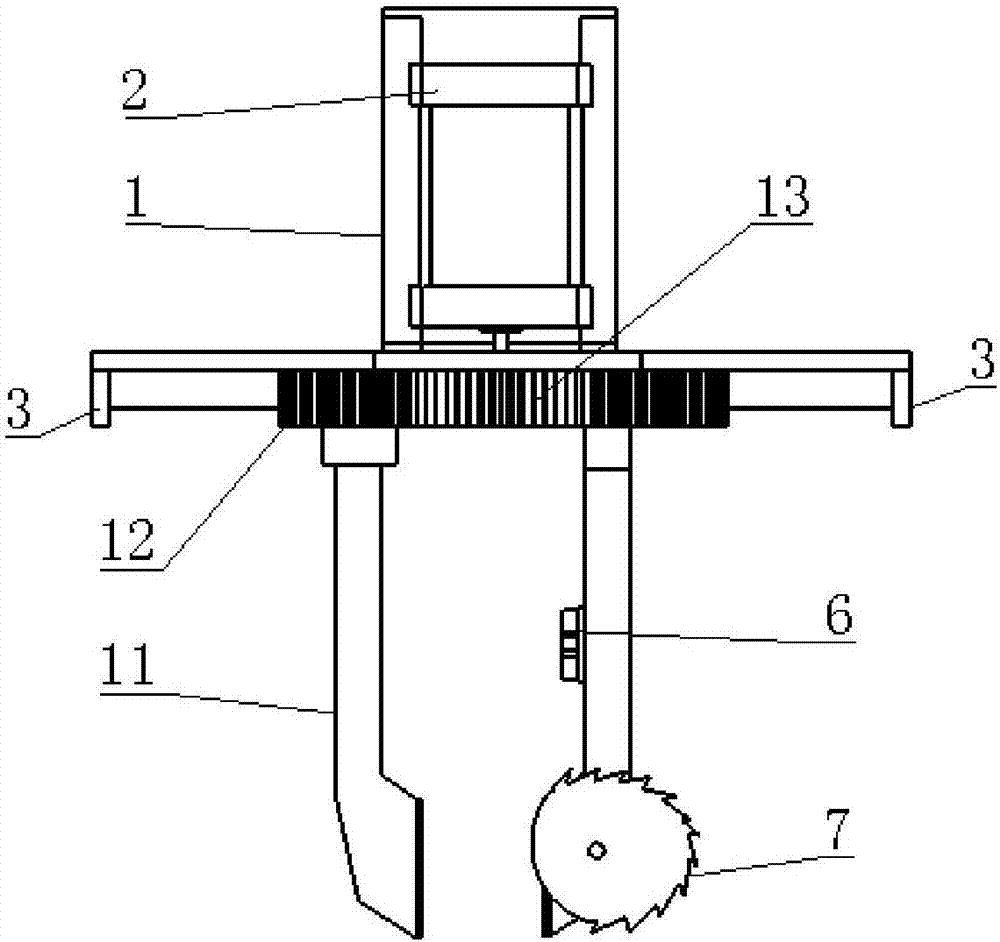
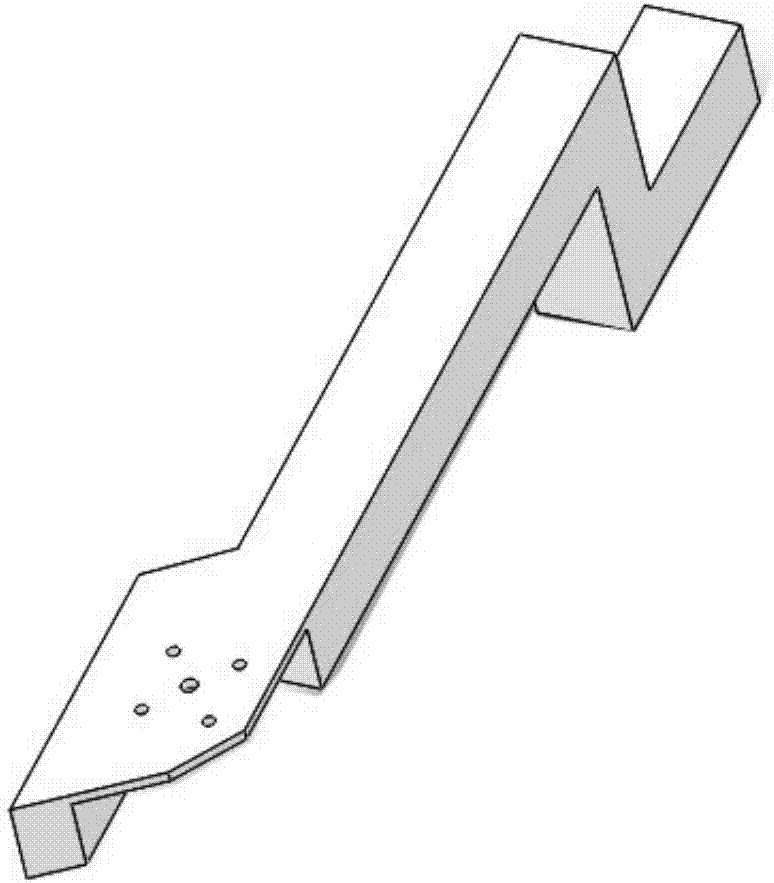
[0013] Such as figure 1 , figure 2 , image 3 As shown, the present invention includes a bracket 1, a clamping stepper motor 2, a support 3, a right slider 4, a fixed clamping arm 5, an ultrasonic distance measuring sensor 6, a cam serrated knife 7, a cutting stepper motor 8, and an elastic pad Sheet 9, slide rail 10, movable clamping arm 11, rack 12, gear 13, left slider 14, controller; The power output shaft passes through the frame 1 and is coaxially fixedly connected with the gear 13; the two supports 3 are respectively fixed on the two ends of the front side of the support 1, and the two ends of the slide rail 10 are respectively fixed on the two supports 3 on the support 1. Above, the left slider ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More