

Multi-axis robot
A multi-axis robot and axis technology, which is applied in the field of automation, can solve the problems of complex transformation of moving coordinate points, and programmers cannot realize motion control, so as to reduce the number of coordinate transformations, improve motion accuracy and control accuracy, and be economical. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0035] The "horizontal rotation" mentioned in this embodiment means that the rotation axis is in the vertical direction; the "vertical rotation" means that the rotation axis is in the horizontal direction.
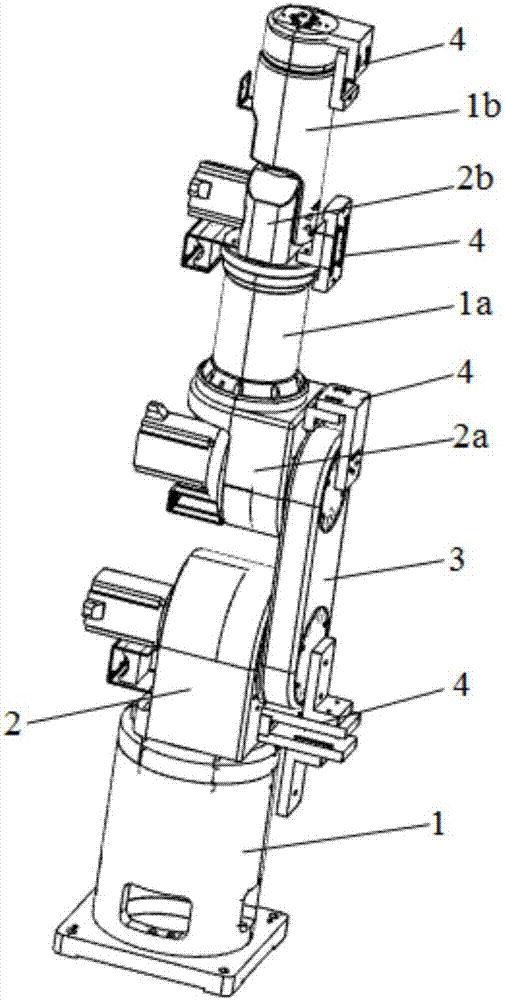
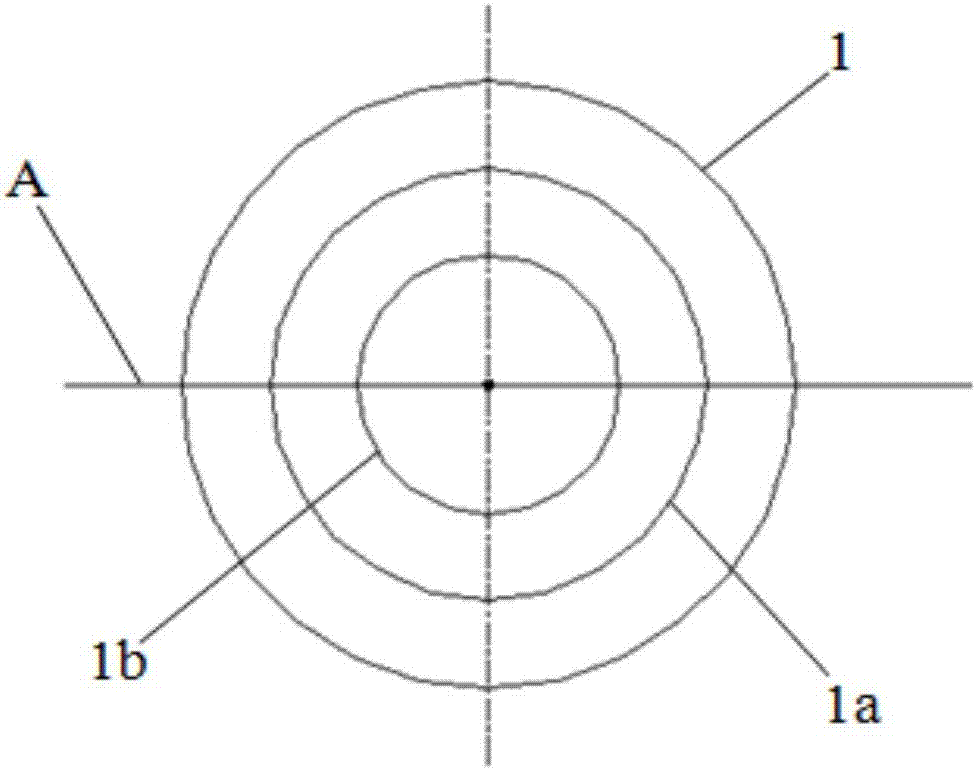
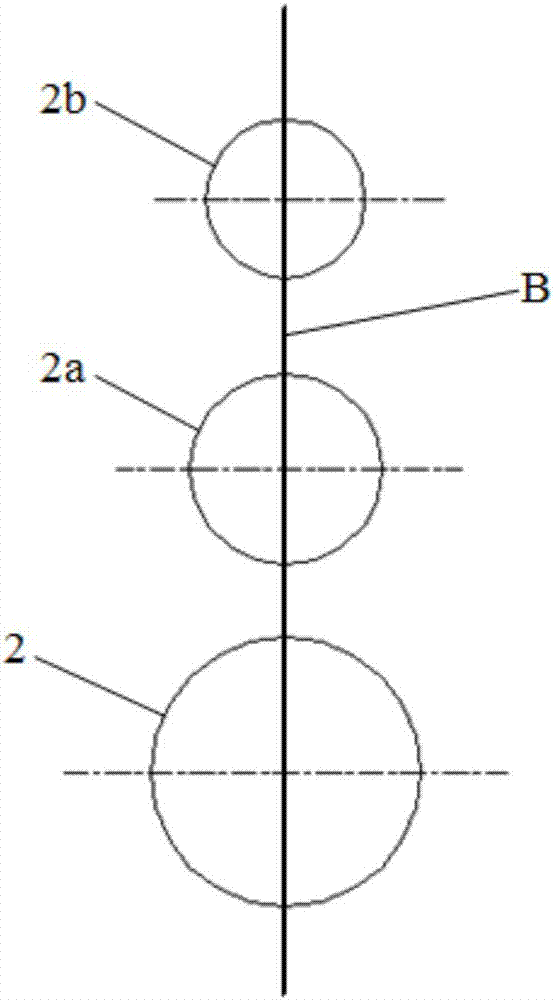
[0036] Please refer to figure 1 , figure 2 , image 3 , this embodiment is a multi-axis robot, which includes three horizontal rotary drive joints 1, 1a, 1b and three vertical rotary drive joints 2, 2a, 2b, the rotation axes of all horizontal rotary drive joints are collinear, and all vertical rotary drive joints The rotation axes of the rotation drive joints are on the same vertical plane, and the rotation axes of all the horizontal rotation drive joints are vertically intersected with the rotation axes of all the vertical rotation drive joints and are on the vertical plane.
[0037] The horizontal rotation drive joint 1 includes a cylindrical first mounting seat 11, a first driving device (not shown in the figure) embedded in the first mounting seat 11, and a first de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More