

Loading robot arm control self-adaption blended learning mapping intelligent control method and system
A robot arm and hybrid learning technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as impracticality, neural network needs to be retrained, robot maintenance inconvenience, etc., to achieve the effect of improving stability and facilitating maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0106] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
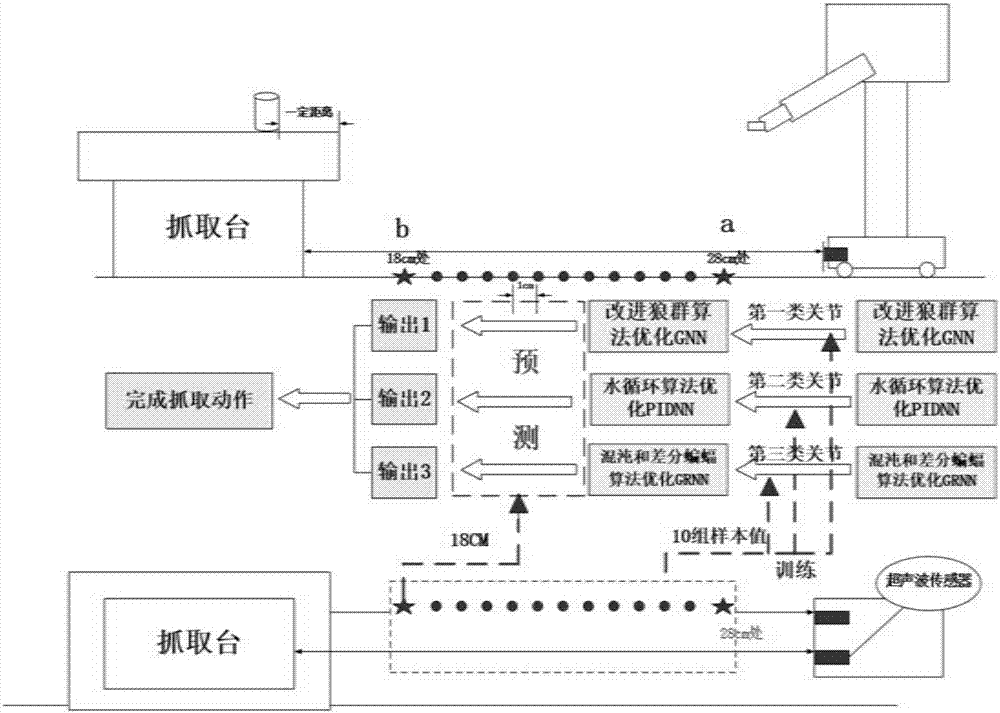
[0107] The schematic diagram of the grabbing process of the carrier robot is as follows: figure 1 Shown; Application control method of the present invention controls the flow chart of robot arm grasping as Figure 4 shown.
[0108] An adaptive hybrid learning mapping intelligent control method and system for manipulating a carrier robot arm, comprising the following steps:
[0109] Step 1: Fix the starting point a of the grasping task where the carrying robot is located in the designated grasping area, use the remote server to control the arm of the carrying robot to repeat multiple grasping trainings, and obtain the grasping sample set;
[0110] Each grasping sample includes the process of the carrying robot moving from the fixed starting point a of the grasping task to the grasping end point b, passing through each moving point in turn, the control ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More