Wall-climbing robot permanent magnetism adsorption force adaptive control device and method thereof
A wall-climbing robot and self-adaptive control technology, applied in the directions of self-adaptive control, general control system, control/regulation system, etc. Affiliated personnel, equipment loss and other problems, to achieve the effect of solving the adsorption force and movement flexibility of the permanent magnet adsorption wall climbing robot, improving the utilization rate of magnetic energy, and preventing up and down movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
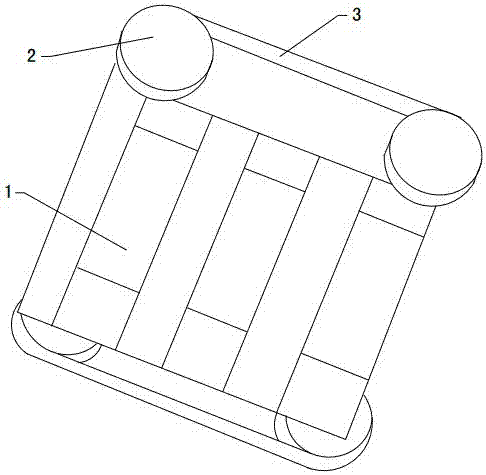
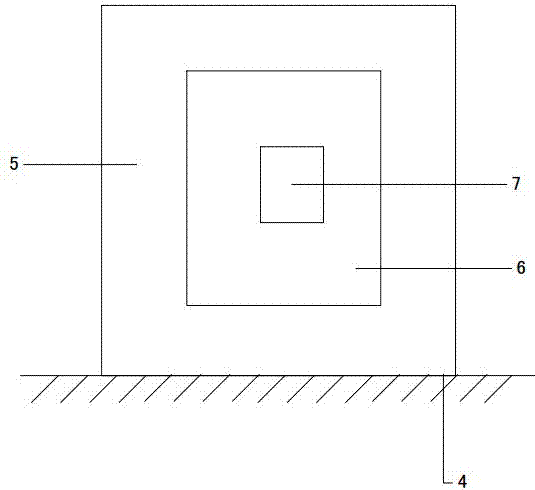
[0072] The present invention relates to a permanent magnetic adsorption force adaptive control device and a method thereof for a wall-climbing robot, wherein the permanent magnetic adsorption force adaptive control device for a wall-climbing robot includes a wall-climbing robot 6, an adsorption device, a permanent magnetic drive device, and a permanent magnetic adsorption force The detection device and the posture monitoring device of the wall-climbing robot, the adsorption device is arranged on the side where the wall-climbing robot 6 is in contact with the steel crawling wall 5, the permanent magnet adsorption force detection device and the permanent magnet drive device are respectively connected with the adsorption device, and the posture monitoring of the wall-climbing robot Device is arranged on wall-climbing robot 6 side and is parallel with its side.
[0073] Such as Figure 9 As shown, the permanent magnet drive device includes a linearly moving screw 407 and a screw m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More