

AGV (Automatic Guided Vehicle) laser navigation system with inertia compensation
A technology of laser navigation and inertia compensation, applied in the field of AGV laser navigation system, can solve the problems of inability to meet the high precision of terminal positioning, difficult to change the working scene, and high requirements for the use environment, and achieves simple structure, reduced complexity requirements, and low cost. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
[0023] The specific implementation of the present invention will be described in detail below in conjunction with the accompanying drawings.
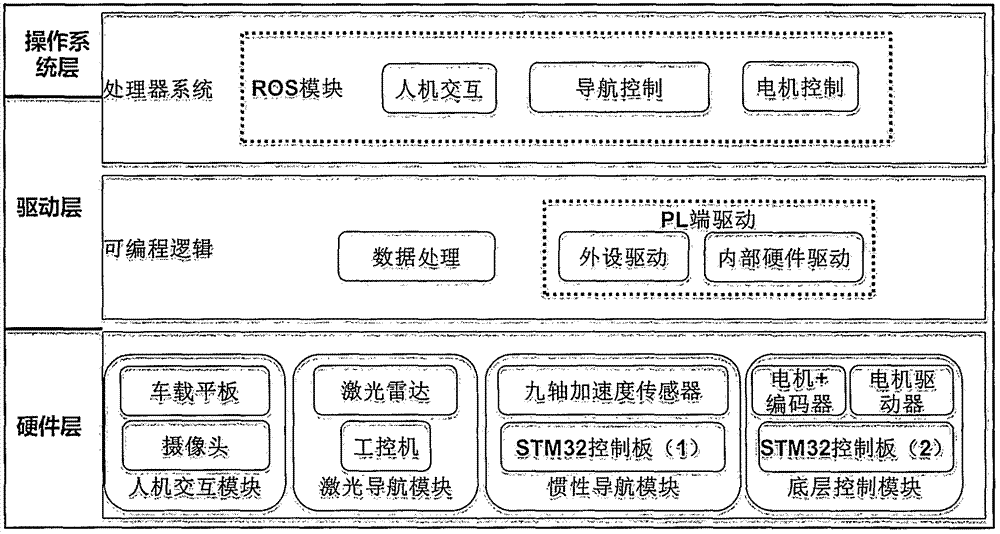
[0024] Such as figure 1 As shown, it is an overall system block diagram of an AGV laser navigation system with inertia compensation provided by the embodiment of the present invention. In this embodiment, the AGV navigation system can capture the surrounding environment information in all directions, establish a surrounding environment map and identify its own position and posture, and judge whet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More