

A Pose Control Method for Unmanned Underwater Vehicle Based on Penalized Wavelet Network
A technology of wavelet network and control method, which is applied in the fields of underwater operations, motion control, and pose control of unmanned underwater vehicles. It can solve the problems of poor generalization performance and achieve the effect of reducing the amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described in detail below in conjunction with the drawings and specific embodiments.
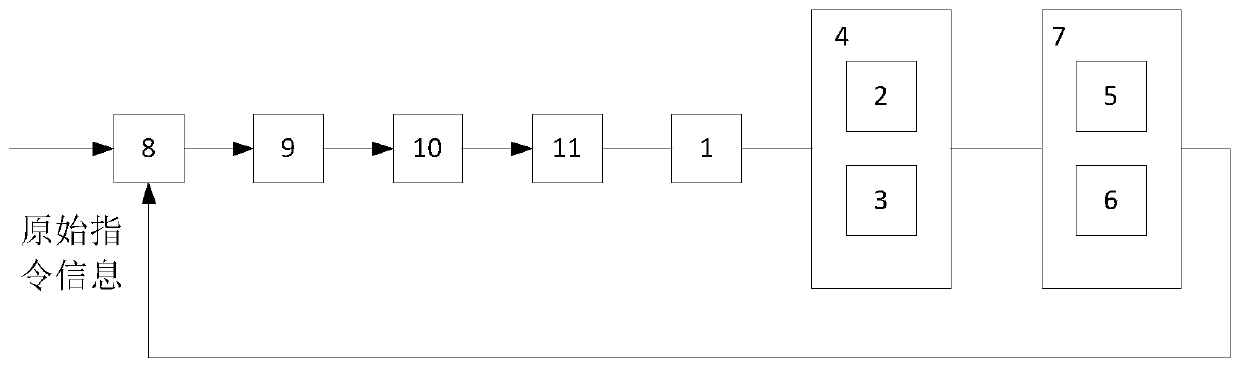
[0042] Such as figure 1 The present invention shows an unmanned submarine position control device based on a penalty wavelet network. Including 1 unmanned submarine, 2 position reference system, 3 heading sensor, 4 information acquisition unit, 5 outlier elimination system, 6 Kalman filter, 7 data processing unit, 8 chart information system, 9 control parameter setting system , 10 control system, 11 power propulsion system.
[0043] The present invention is to apply a position control method based on the penalty wavelet network PID control to the position and attitude control method of the unmanned submarine, so that its position relative to the target is kept unchanged, and has a position and attitude control that can resist environmental disturbance ability.
[0044] 1. Information collection unit
[0045] The information collection unit 4 includes a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More