

Visual SLAM closed-loop detection method based on depth neural network
A deep neural network, closed-loop detection technology, applied in the field of image processing, can solve problems such as being easily affected by the environment, and achieve the effect of good performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The specific implementation of the present invention will be described in detail below with reference to the accompanying drawings.
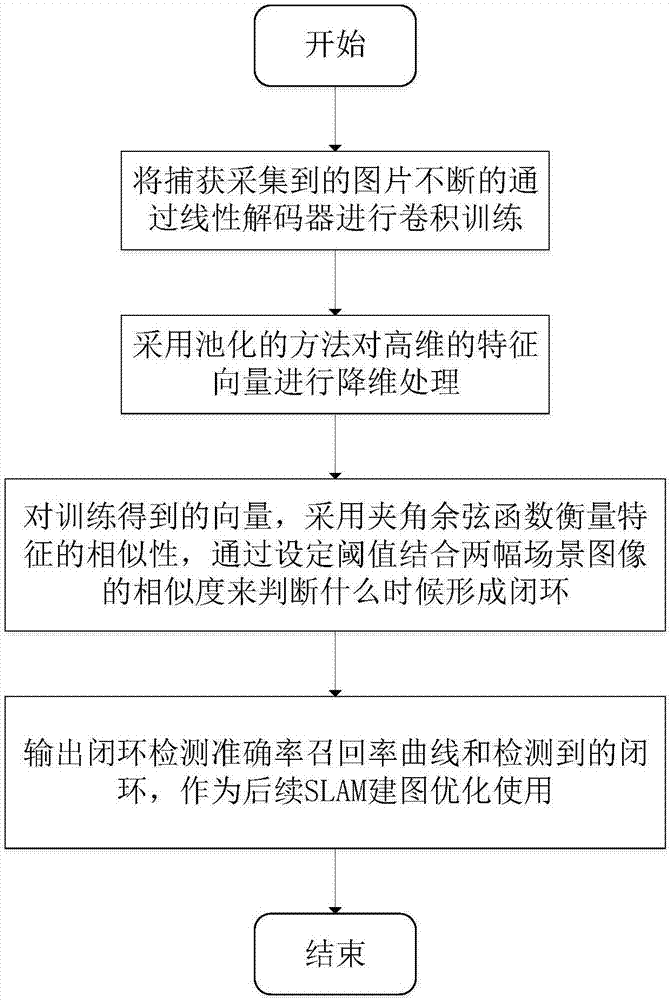
[0061] The platform of the implementation is: Windows 10 system, MATLAB R2015b, the process is as follows figure 1 shown:
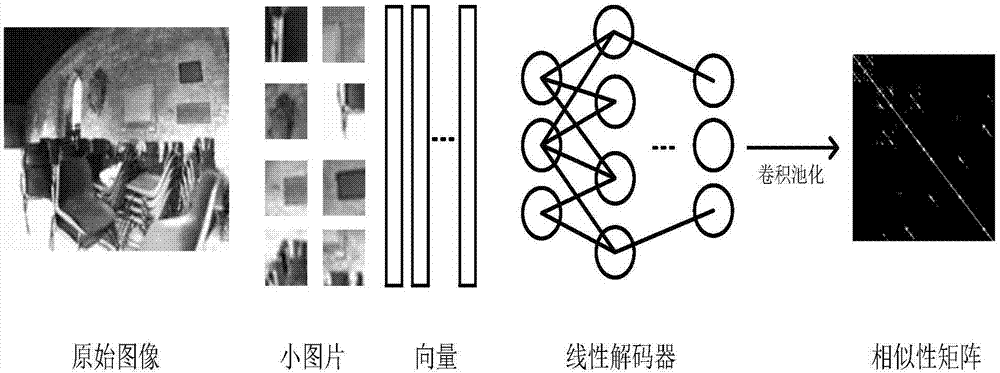
[0062] Step 1: Use the dataset of similar scenes to train the network parameters of the linear decoder. image 3 Visualization of the weights for the trained linear decoder.
[0063] Step 2: Convolution training is continuously performed on the captured images through the linear decoder. figure 2 The flow of operation can be seen.
[0064] Step 3: Use the pooling method to reduce the dimension of the high-dimensional feature vector.
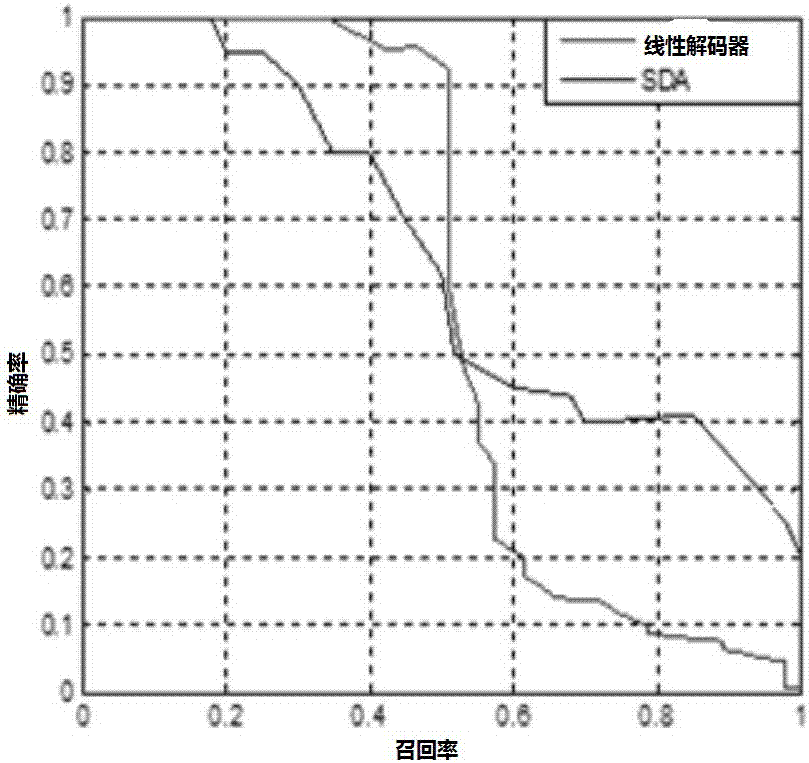
[0065] Step 4: For the vectors obtained by training, use the angle cosine function to measure the similarity of features, and determine when a closed loop is formed by setting a threshold and combining the similarity of the two scene images. Figure 4 Specifically, the characteris...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More