

Conversion method between two independent system coordinate systems based on quaternion
A technology of an independent system and conversion method, which is applied in the direction of graphic image conversion, image data processing, image analysis, etc., and can solve the problem of not mentioning the system information conversion method.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Below in conjunction with accompanying drawing, the present invention will be further described:
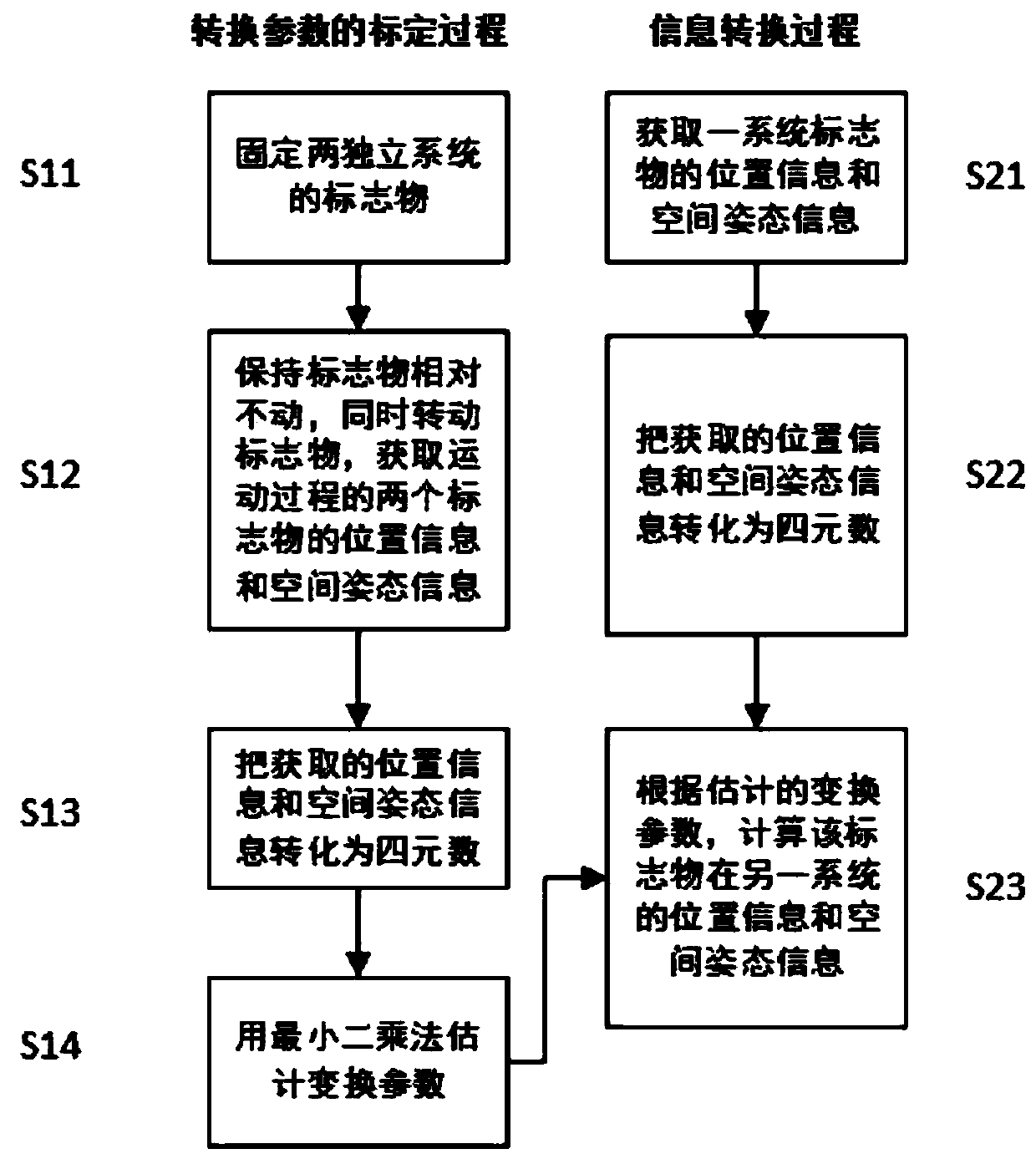
[0039] like Figure 1-Figure 4 As shown, the conversion method between two independent system coordinate systems based on quaternions, including the calibration process of conversion parameters and the information conversion process,
[0040] The specific steps of the conversion parameter calibration process are as follows:
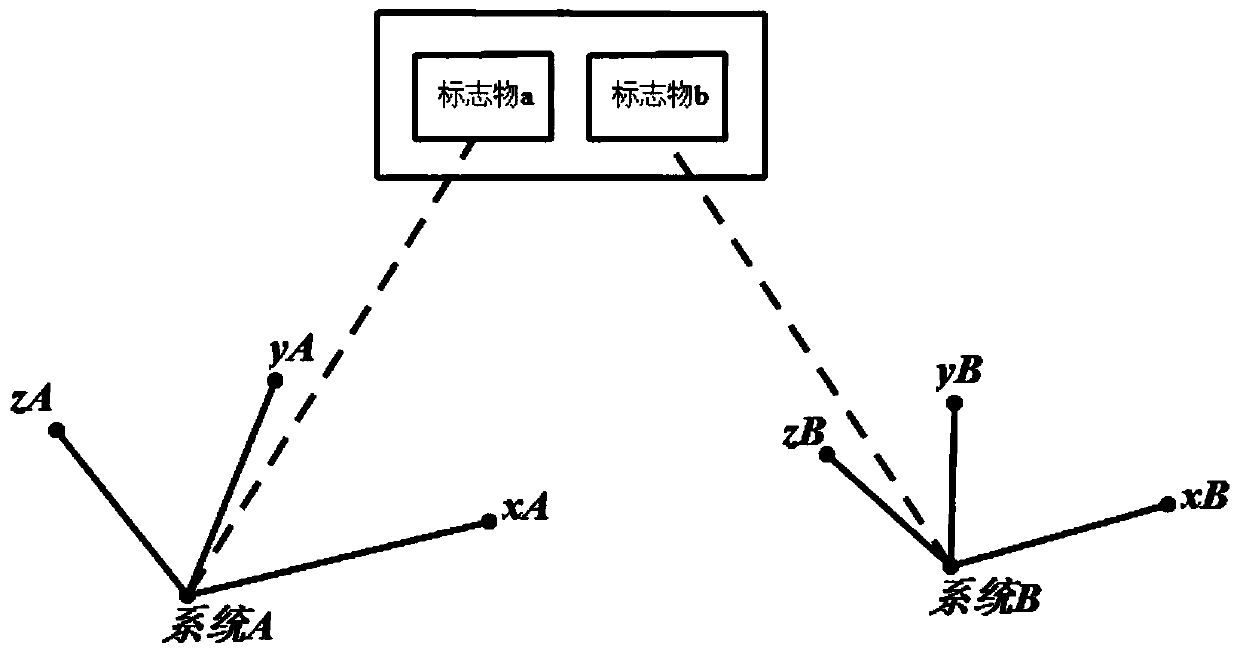
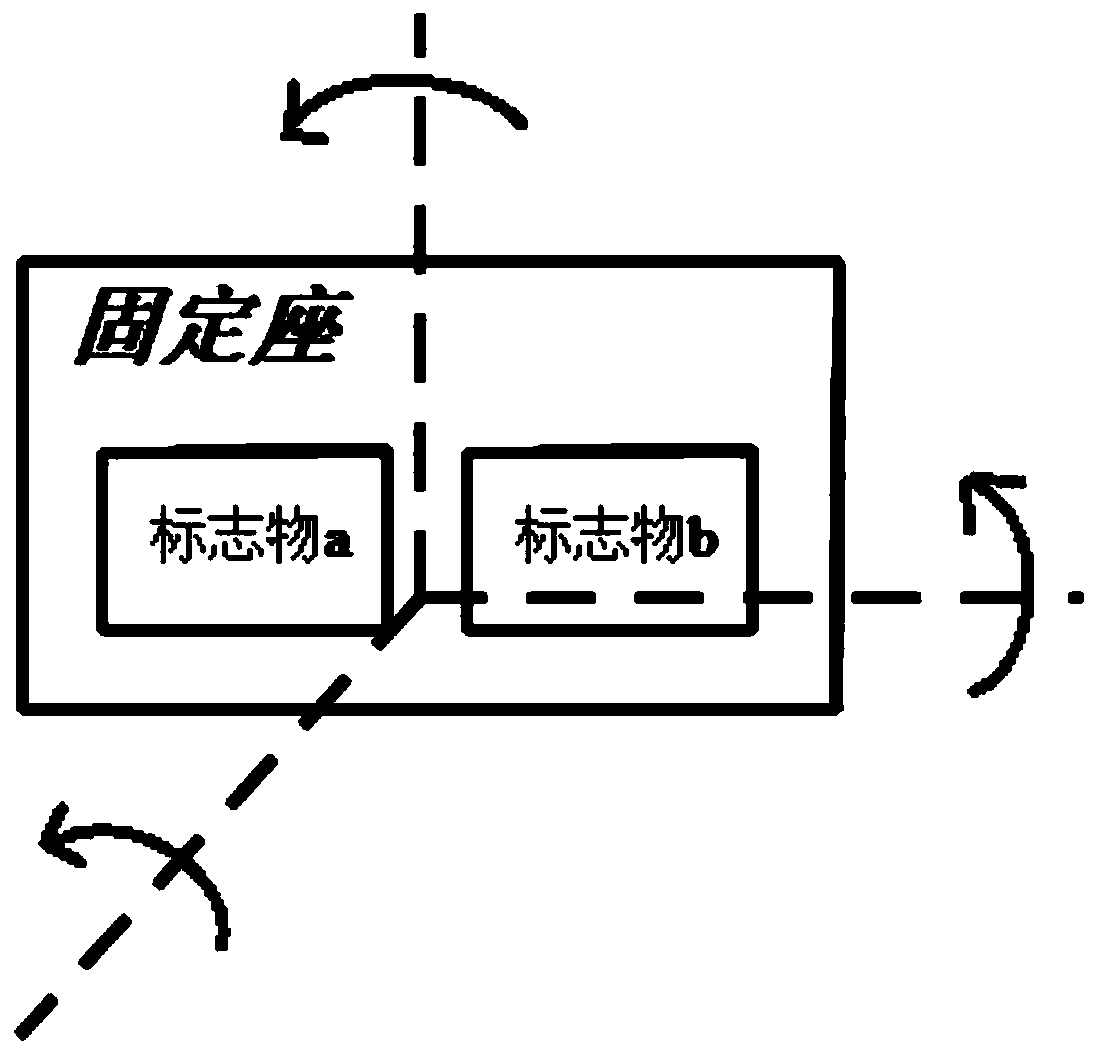
[0041] S11: The marker of system A is a, and system A measures the position information and space attitude information of marker a; the marker of system B is b, and system B measures the position information and space attitude information of marker b. Marker a and marker b are fixed on a fixed seat;
[0042] S12: keep the markers relatively still, rotate the fixed seat to rotate marker a and marker b at the same time, and obtain the position information and spatial attitude information of the two markers during the movement process of n groups;
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More