

Monocular dense simultaneous localization and mapping (SLAM) method
A dense and map-based technology, which is applied in image enhancement, image analysis, image data processing, etc., can solve problems that require a lot of time, low reconstruction accuracy, and noise in plane detection algorithms, and achieve improved reconstruction efficiency and good robustness Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the implementation manners in the present invention, all other implementation manners obtained by persons of ordinary skill in the art without making creative efforts belong to the scope of protection of the present invention.
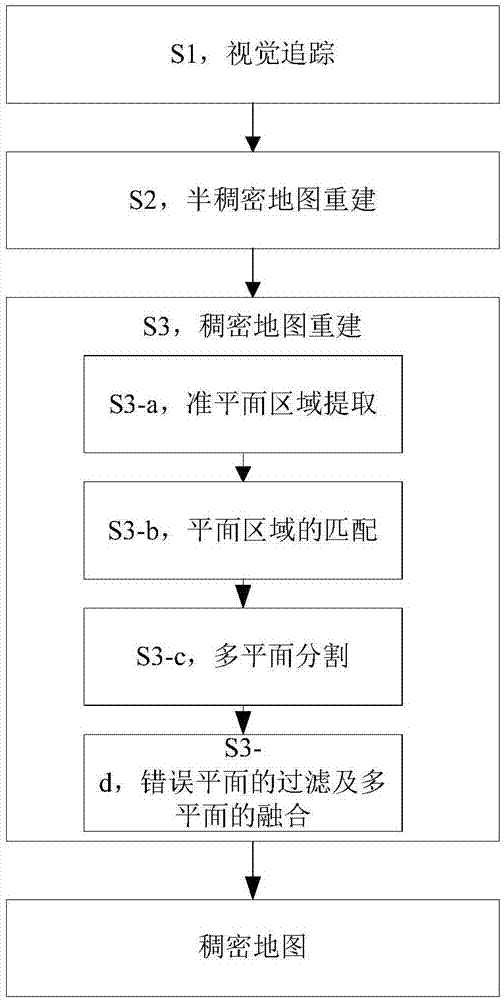
[0026] Such as figure 1 As shown, the monocular dense real-time positioning and map reconstruction method of the present invention includes the following steps:
[0027] S1, visual tracking. Obtain the image stream, and optimize the camera pose corresponding to each frame of image through visual tracking. Specifically, by minimizing the photometric error of high gradient points, the camera pose corresponding to each frame...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More