

Indoor scene layout estimation and target region extraction method based on RGB-D images
A technology for target areas and indoor scenes, applied in the field of artificial intelligence computing, can solve problems such as complex layout estimation and target extraction, and achieve the effect of improving segmentation effect, fast calculation speed, and easy implementation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
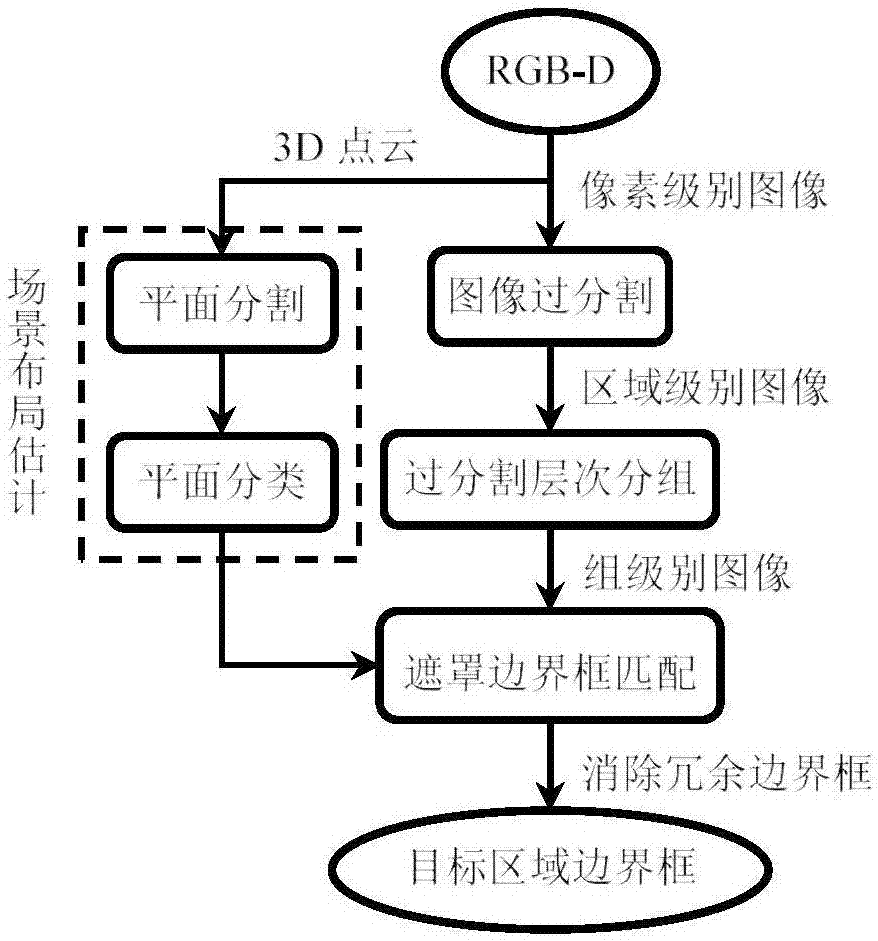
[0018] figure 1 It is an overall flow chart of the RGB-D image-based indoor scene layout estimation and target area extraction method proposed by the embodiment of the present invention. The steps of this embodiment are as follows
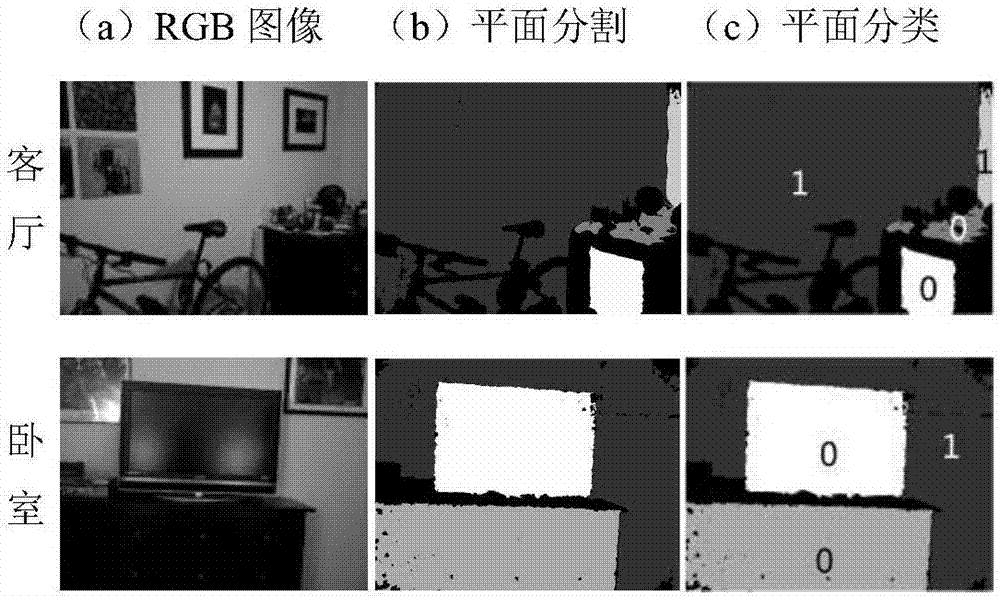
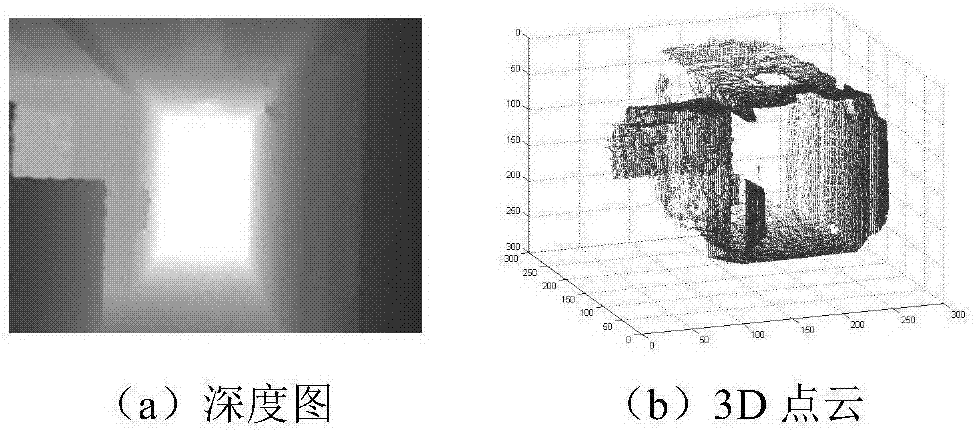
[0019] Step (1) Scene layout estimation: first convert the depth map into a dense 3D point cloud, such as figure 2 As shown in , then the planar area and non-planar area are divided into planar area and non-planar area by calculating the three-dimensional Euclidean distance between point clouds, and the obtained planar area is classified into boundary plane and non-b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More