

An Adaptive Method for Robot Casting Grinding Based on Vision System
A vision system and robot technology, applied in the field of robot casting grinding adaptation based on vision system, can solve problems such as failure to detect and re-grind in time, and inability to guarantee the quality of grinding castings.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
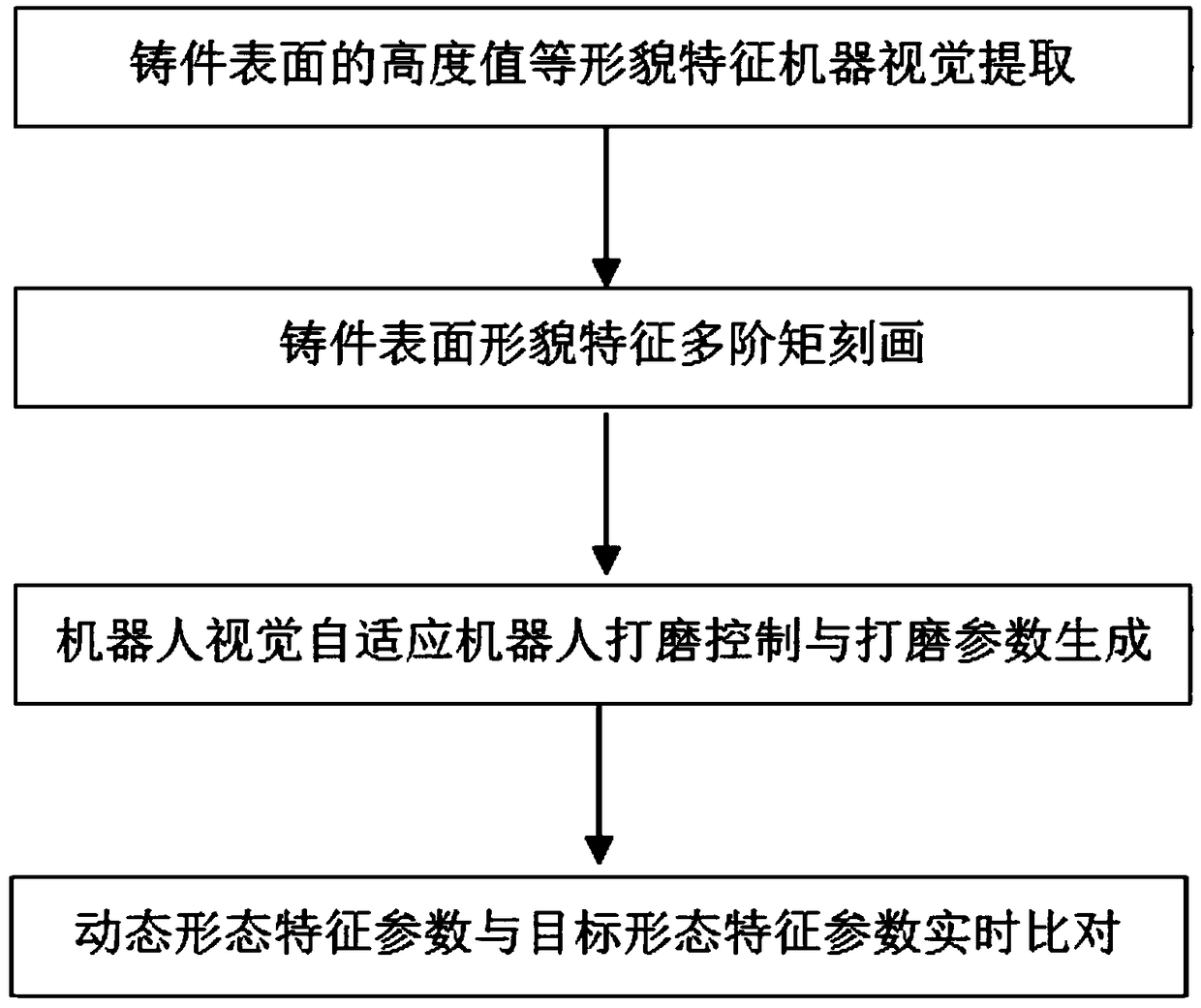
[0040] Such as figure 1 As shown, using an adaptive method for robot casting grinding based on the vision system, the HT300 cylinder casting with a weight of 38kg is automatically polished, and the volume of the casting is 400mm×320mm×253mm. The specific steps are as follows:
[0041] S01: Machine vision extraction of casting surface topography features:
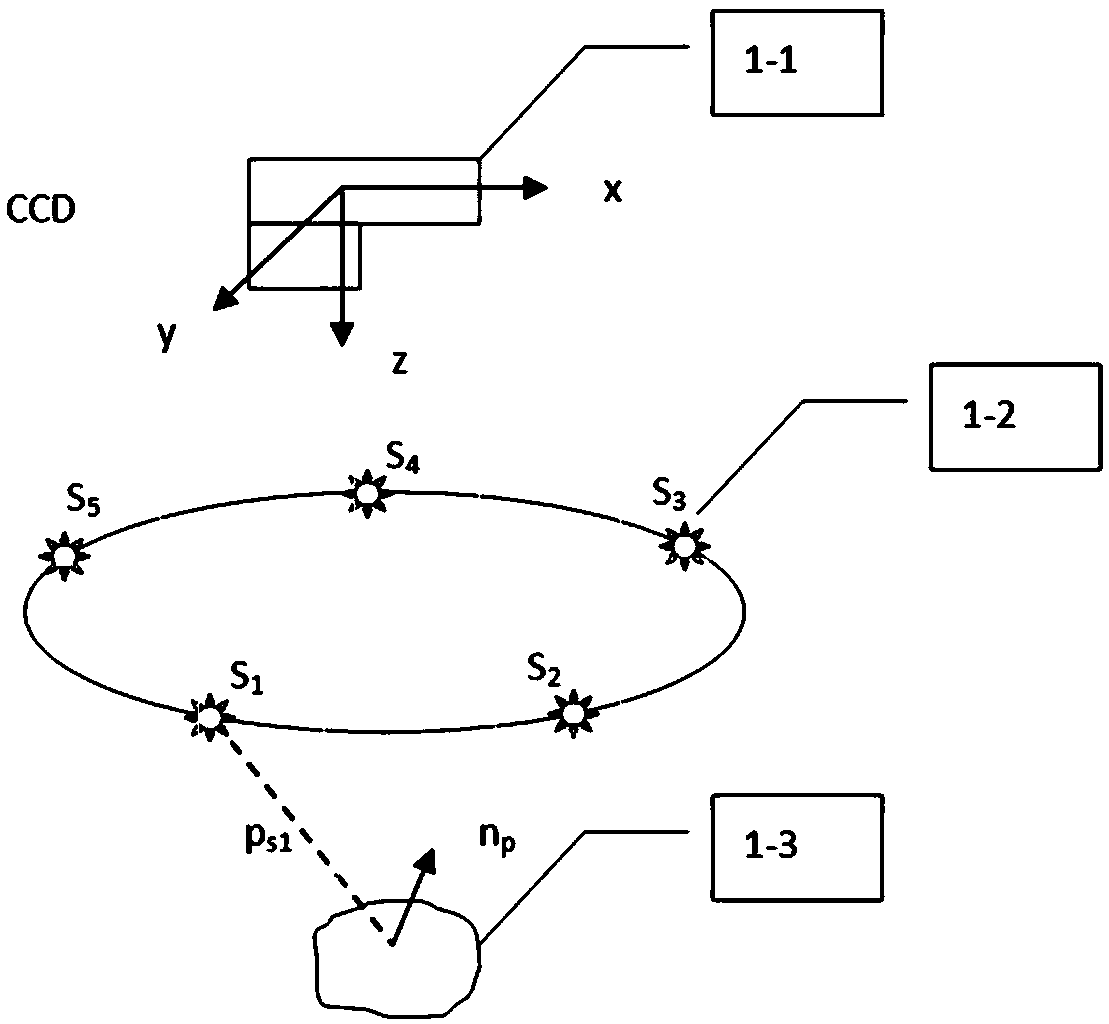
[0042] The processed workpiece is a 4-cylinder cylinder block, and the Panasoinc WV-CP410 / G CCD camera fixed above the cylinder block is used to capture the light image. The focal length of the camera is f=16mm, and the distance from the camera to the cylinder block is u=745mm. -1 to capture the illumination image, the light source (1-2) irradiates the casting surface photometric stereoscopic vision from different dire...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More