

Solution to redundant mechanical arm end effector posture keeping
An end-effector and attitude-maintaining technology, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of complex attitude-maintaining algorithms, attitude deformation, inconvenient practical use, etc., and achieve the effect of end-execution attitude-maintaining
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
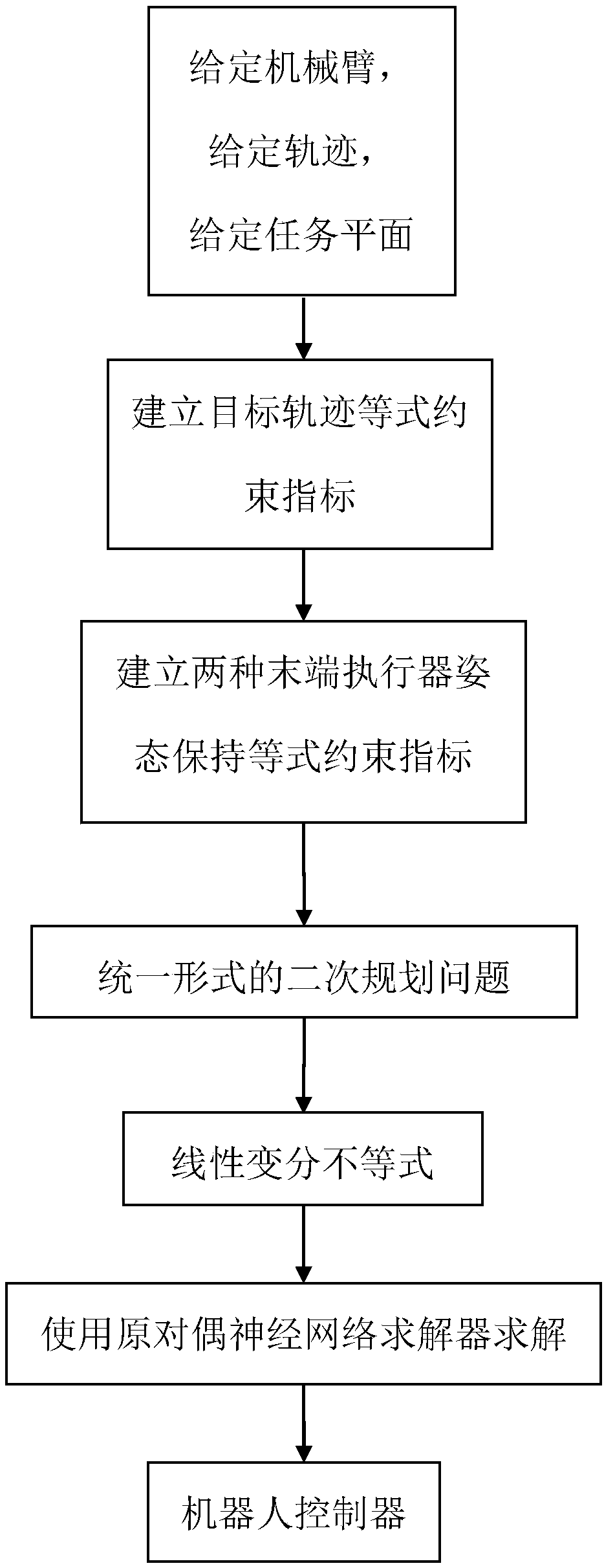
[0070] figure 1 A solution to the posture maintenance of the end-effector of the redundant manipulator is shown, which mainly consists of establishing the constraint index of the target trajectory equation, measuring the value of the normal vector of the task plane of the manipulator in the base coordinate system of the manipulator, and establishing two One end-effector attitude maintaining equation constraint index, the target trajectory equation constraint index to be established, and the two end-effector attitude maintaining equation constraint indexes established are written as a unified quadratic programming problem, and the quadratic programming The transformation of the problem into the linear variational inequality specifically includes several steps of solving the linear variational inequality by using the original dual neural network solver.
[0071] The established goal trajectory equality constraint index is: Among them, J E is the Jacobian matrix of the end eff...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More