

A multi-rotor UAV optical flow hovering method based on imu attitude compensation
A multi-rotor UAV, UAV technology, applied in attitude control, photo interpretation, image enhancement and other directions, can solve problems such as inability to hover accurately, poor real-time performance, poor environmental adaptability, etc., to ensure accuracy, guarantee Real-time performance, the effect of controlling the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
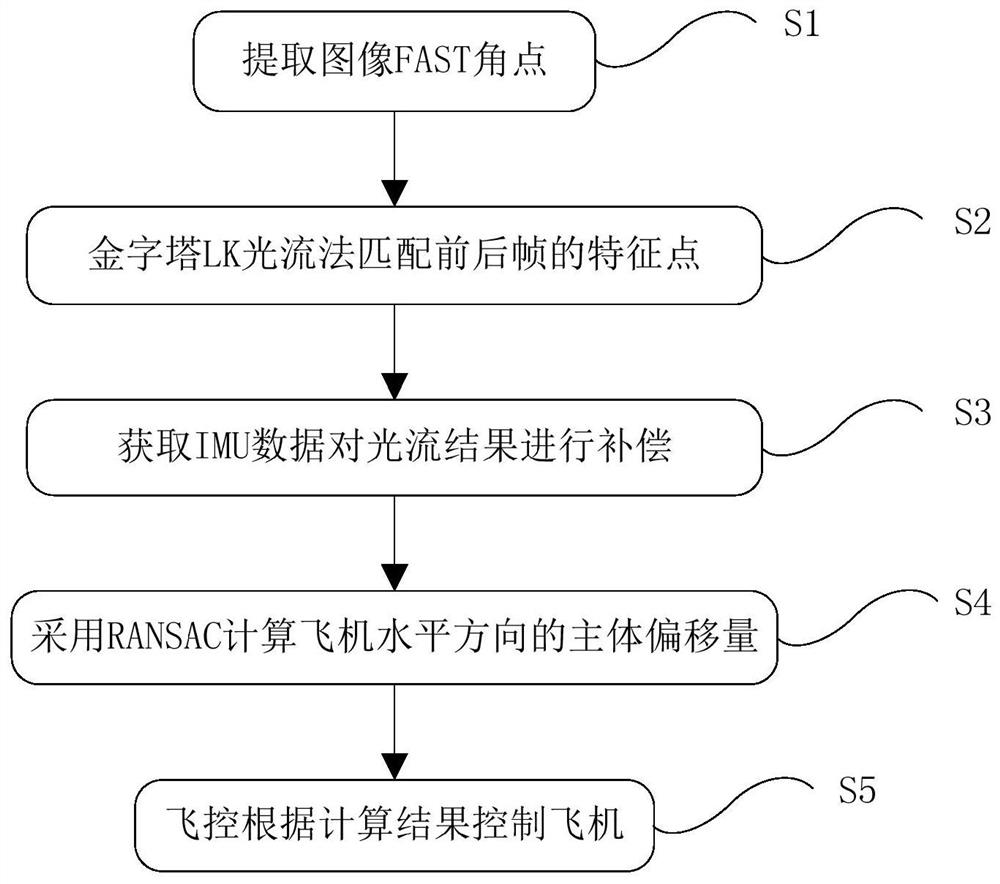
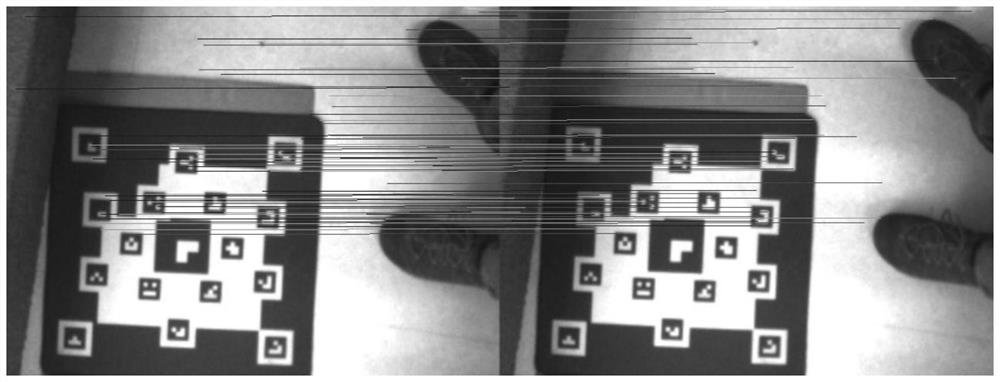
[0037] as attached figure 1 As shown, the present invention provides a multi-rotor UAV optical flow hovering method based on IMU attitude compensation. First, extract FAST corner points from all image frames captured by the optical flow camera; then use the pyramid LK optical flow method to match the front and rear frames Extracted FAST corner points, and establish feature point pairs, and then obtain the optical flow structure of the front and rear image frames through the feature point pairs; then use the obtained IMU data to compensate the optical flow results; then use the RANSAC random sampling consistency method Calculate the main body offset in the horizontal direction of the aircraft; finally send the calculation result to the flight control device to keep the aircraft hovering.
[0038] The concrete implementation steps of described...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More