

Industrial mechanical arm execution end track control method
A technology of industrial machinery and trajectory control, applied in the direction of manipulator, program control manipulator, program control, etc., can solve the problems of motion trajectory jitter of industrial manipulator, mechanical wear of execution parts, failure of high-frequency dynamic response, etc., so as to reduce the dynamic effect. , stable motion, strong real-time effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
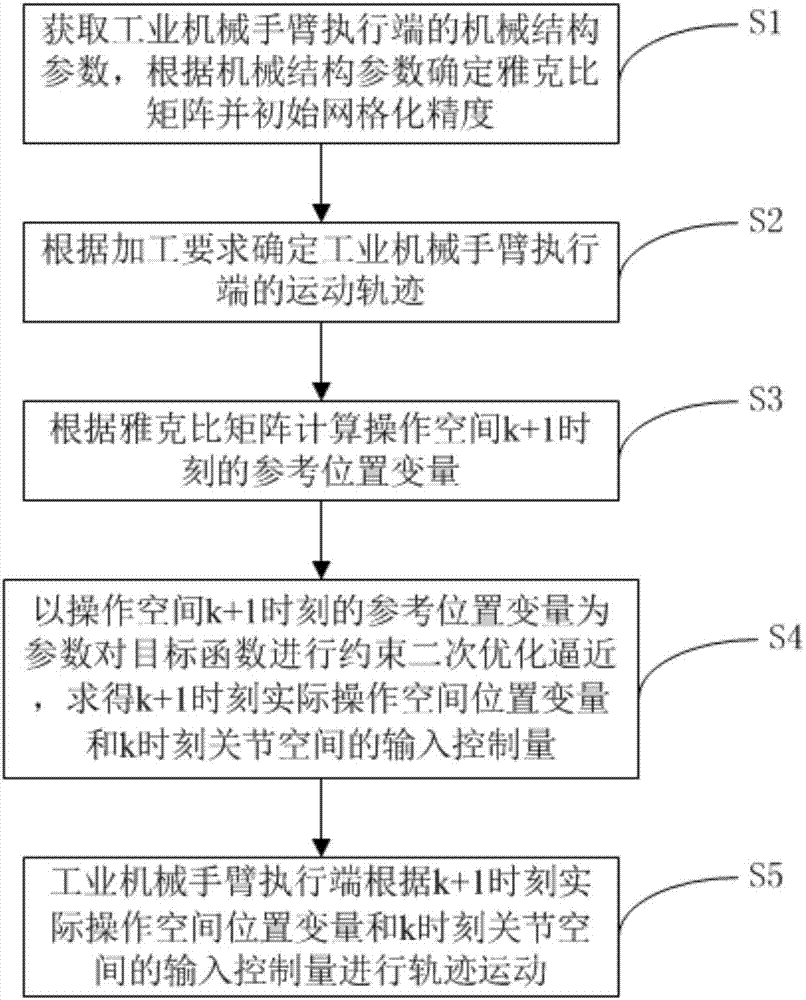
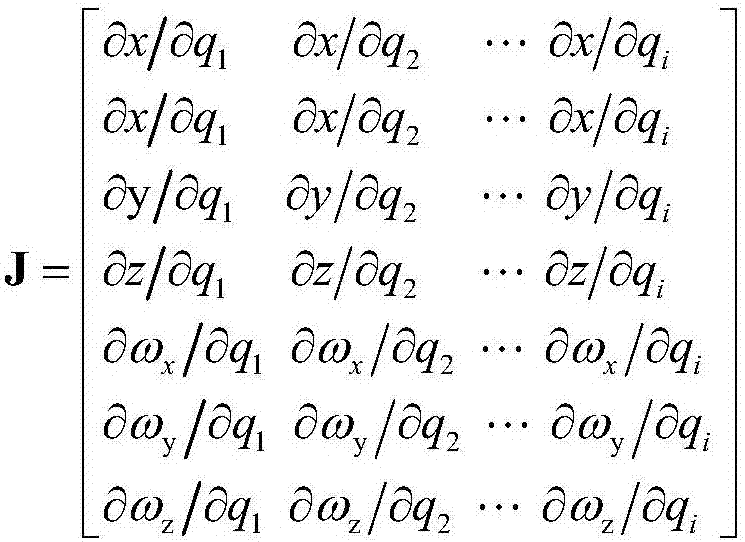
[0033] Such as figure 1 As shown, the trajectory control method of the execution end of the industrial robot arm provided by this embodiment begins with step S1, obtaining the mechanical structure parameters of the execution end of the industrial robot arm, determining the Jacobian matrix and initial gridding accuracy ε according to the mechanical structure parameters. In this embodiment, the mechanical structural parameters of the executing end of the industrial robot arm include degrees of freedom, joint rotation angles, and arm length of the executing end of the industrial robot arm. However, the present invention does not make any limitation thereto. The Jacobian matrix determined according to the mechanical structure parameters is as follows:
[0034]
[0035] where q={q 1 ,q 2 ,...,q i} is the joint space angle variable, (x, y, z) is the execution end coordinates, (ω x ,ω y ,ω z ) is the rotation angle of the execution end.
[0036] Step S2. Determine the moti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More