

Narrow space bolt positioning and installing robot and control method
A technology of bolt positioning and robotics, which is applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., and can solve problems such as inability to assemble, difficulty in manually operating tools, and limited visible range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
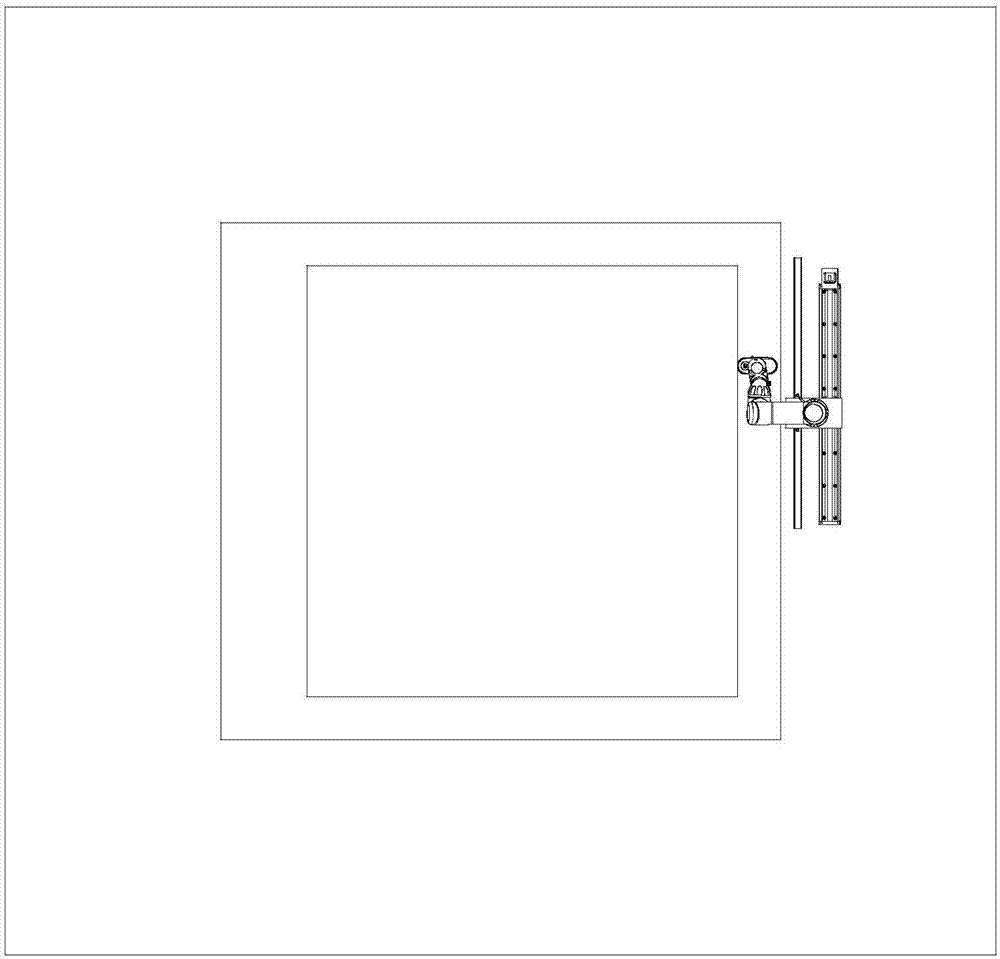
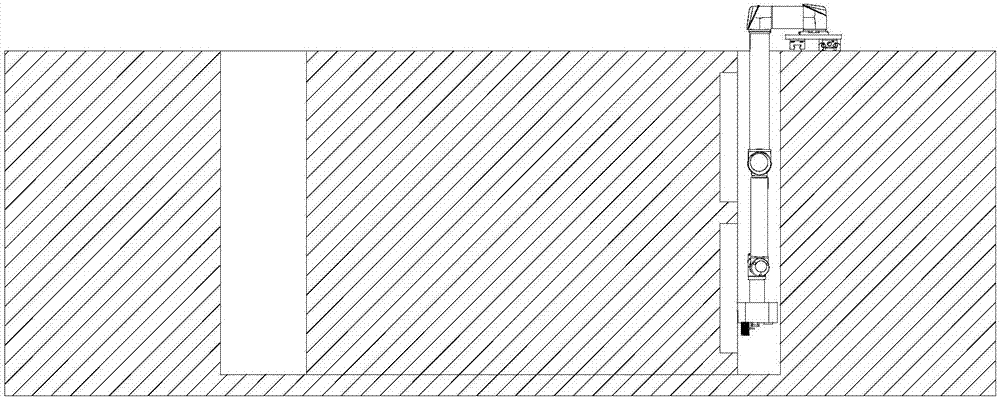
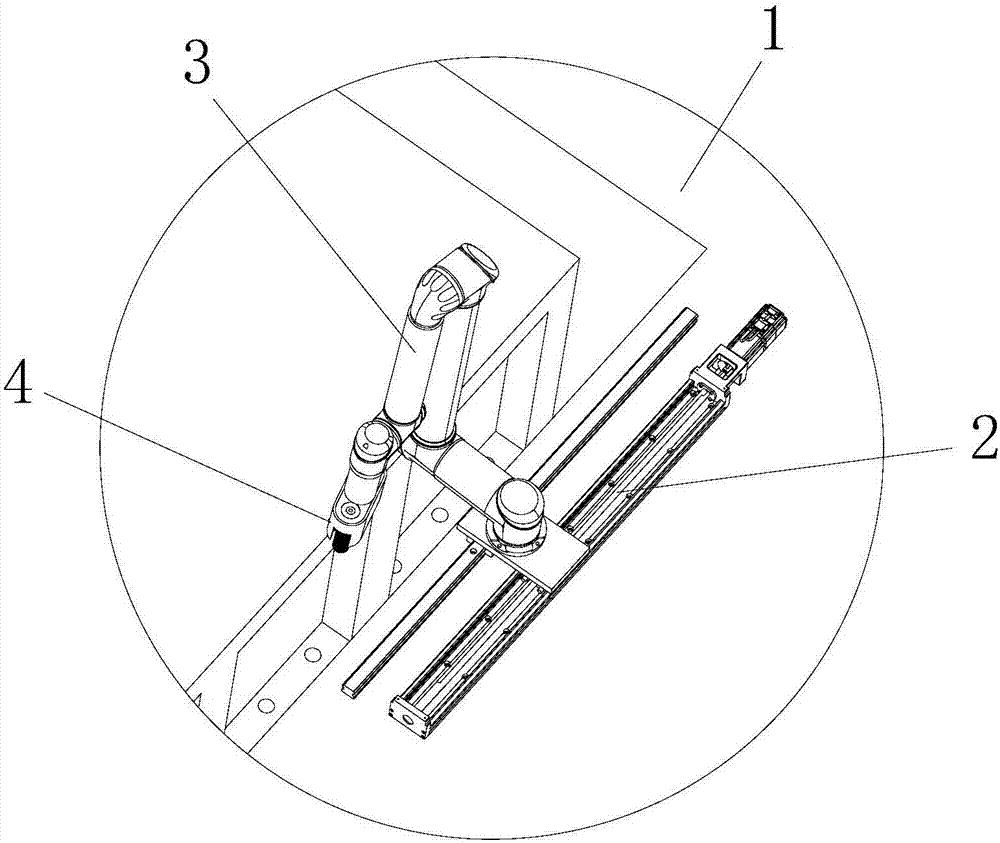
[0084] Such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 and Figure 6 As shown, the present invention discloses a bolt positioning installation robot in a narrow space. The robot is mainly used for assembling threaded holes in a narrow space. The structure mainly includes an installation platform 1 for fixing and installing the robot, and a fixed plate, fixture 4 for tightening bolts, industrial robot 3 for driving fixture 4 to a specified position, motion module 2 for driving industrial robot 3 translation, and processing image data and driving each execution The widget's controller. The installation platform 1 is fixed, the fixed plate is installed on the installation platform 1, the motion module 2 is installed on the fixed plate, the tooling fixture 4 is installed at the end of the industrial robot 3, and the industrial robot 3 is installed on the moving On the module 2, the controller is electrically connected to the motion module 2, the industrial ro...
Embodiment 2
[0138] The invention provides a bolt positioning and installation robot in a narrow space, which specifically includes a mechanical unit, a control unit, a drive unit, a vision unit, and a display operation unit.
[0139] Preferably, the mechanical unit includes a 6-joint general-purpose industrial robot 3, a special fixture 4, and a motion module 2.
[0140] Preferably, the 6-joint general-purpose industrial robot 3 adopts a motor-built-in six-joint series structure, wherein each arm has a fully expanded length of 1500mm, a maximum arm diameter of 100mm, a minimum arm diameter of 60mm, and a maximum load of 300Kg, which can be used in a narrow space of 200mm. work inside.
[0141] Preferably, the 6-joint general-purpose industrial robot 3 is made of materials such as aluminum alloy, steel parts, and ABS plastic, and its weight reaches about 35kg.
[0142] Preferably, the 6-joint general-purpose industrial robot 3 is equipped with a pressure sensor, which can automatically st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More