

Method for mining surface monitoring in mountainous area based on measurement robot and close-range photogrammetry
A technology for measuring robots and close-range photography, applied in measuring instruments, measuring devices, surveying and navigation, etc., can solve the problems of difficulty in reflecting the law of continuous movement and deformation, low precision of close-range photogrammetry technology, and large field workload, etc. The effect of moving deformation omissions, avoiding errors, and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described in detail through specific embodiments below.
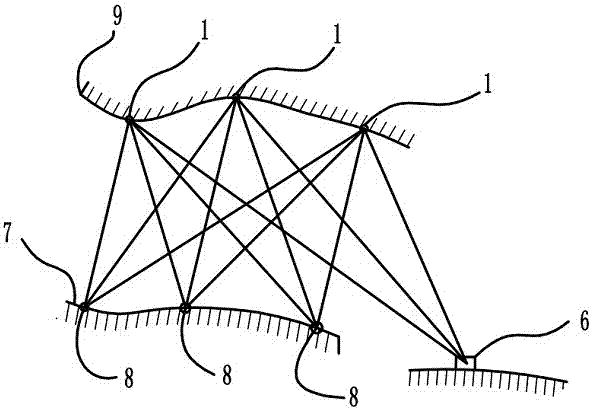
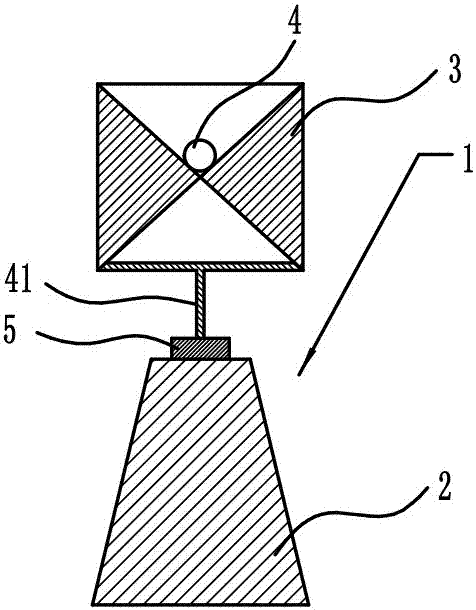
[0034] The reference signs in the drawings of the description include: monitoring station 1, observation pier 2, target 3, SMR prism 4, base 5, reference station 6, stable area 7, photographing station 8, deformation area 9, leveling cylinder 21 , Telescopic cylinder 22, wiping rod 23, angle sensor 24, hair brush 25, controller 26, support rod 41.
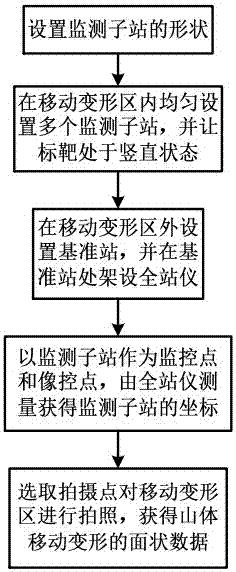
[0035] Such as image 3 The structure of the monitoring station 1 shown, and as figure 1 and figure 2 The surface monitoring method of mountainous mining based on measuring robot and close-range photogrammetry is shown, including the following contents:
[0036] S1, first select a plurality of monitoring stations 1, and bury 80% of the monitoring stations 1 evenly in the moving deformation area 9, and all the monitoring stations 1 in the moving deformation area 9 are not located on the same straight line or on the same plane, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More