

Intelligent decomposition control planning method for path of carrying robot in intelligent environment
A technology of intelligent environment and static path planning, applied in the direction of vehicle position/route/height control, non-electric variable control, control/regulation system, etc., can solve the problem of being unable to cope with unknown changes in intelligent and complex environments, and robots taking too long Calculate and calculate disasters and other issues to achieve the effect of improving obstacle avoidance processing efficiency, shortening obstacle avoidance time, and simple learning rules
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0051] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
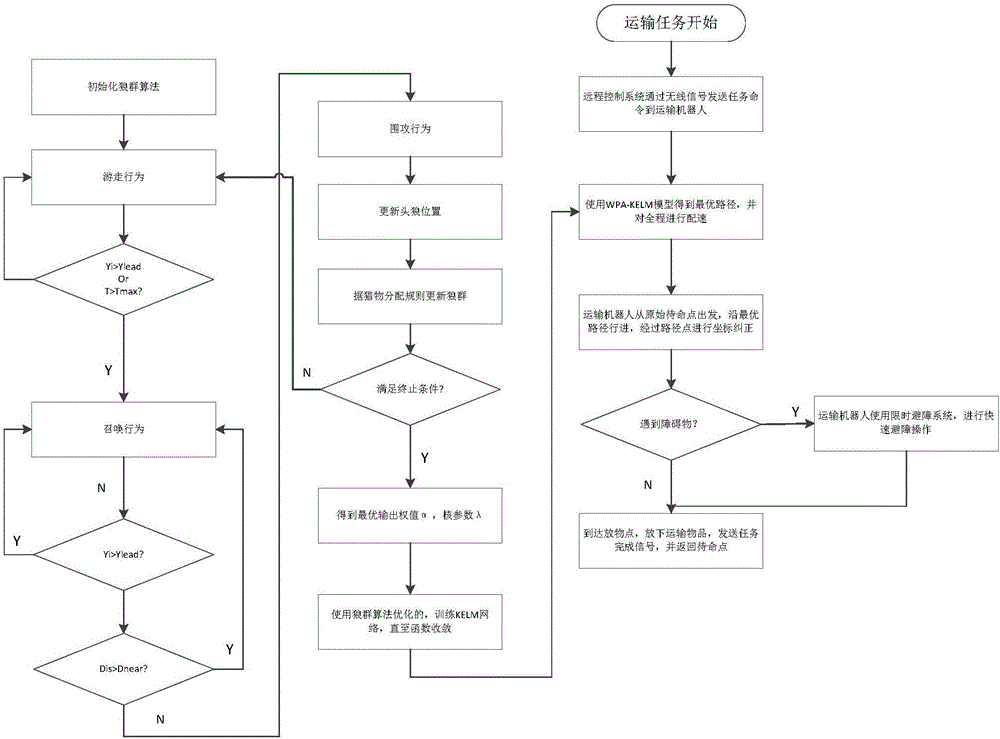
[0052] Such as figure 1 As shown, a path intelligent decomposition control planning method for a carrier robot in an intelligent environment includes the following steps:
[0053] Step 1: Construct a three-dimensional coordinate system of the global map for the carrying area of the carrier robot, and obtain the coordinates of the walkable area under the three-dimensional coordinate system of the global map;
[0054] The ground center point of the carrying area is the origin, the due east direction is the X axis, the true north direction is the Y axis, and the vertical ground direction is the Z axis;
[0055] The carrying area of the carrying robot is all the connected areas of the floor in a building, and the coordinates of the walkable area refer to the area where obstacles in the building are deleted from all the connected areas of the floor;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More