

Novel parallel pouring robot
A robot and parallel technology, applied in the control of molten metal pouring from ladles, manipulators, program control manipulators, etc., can solve the problems of high price, high risk, high labor intensity, etc., and achieve Zengqiang stability, Optimize the movement process and improve work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
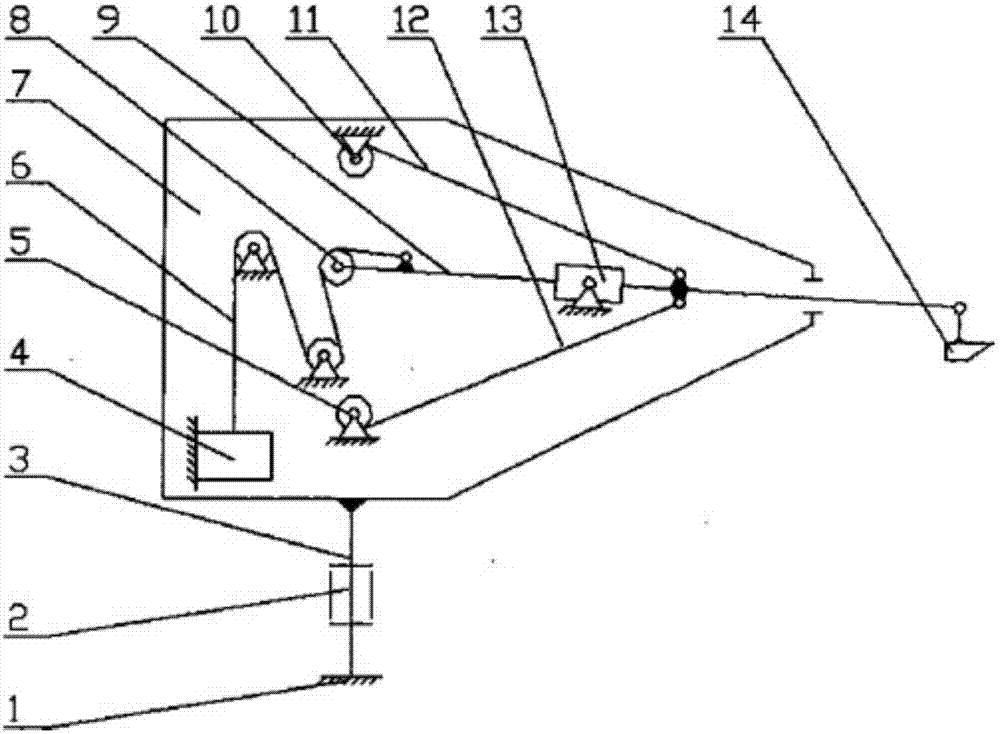
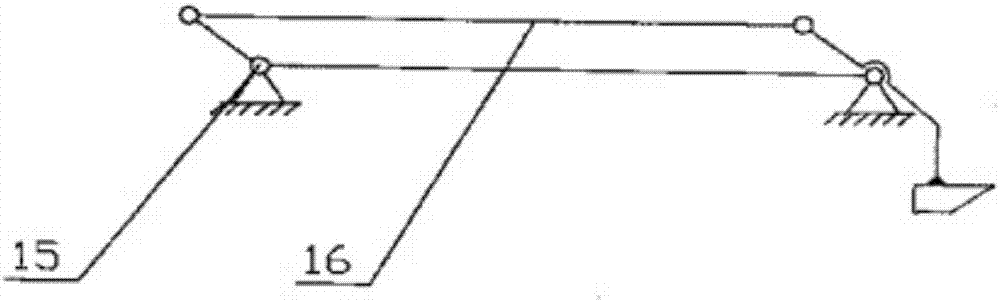
[0017] Such as figure 1 , 2 As shown, the present invention includes a base 1, a rotating pair 2, a turntable 3, a fuselage 7 and a ladle 14; The body 7 is connected; the body 7 includes a counterweight 4, a second reel 5 driven by a servo motor, a counterweight cable 6, a pulley 8, a cross arm 9, a first reel 10 driven by a servo motor, The upper flexible cable 11, the lower flexible cable 12, the swing slider 13; the fuselage 7 adopts a parallel mechanism. The cross arm 9 penetrates into the swing slider 13 and is slidably connected with the swing slider 13. One end of the cross arm 9 is conne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More