A Global Optimal Pose Calculation Method for Optical Trackers
A technology of optical tracking and calculation method, applied in the field of tracking and positioning, can solve the problems of large size of the tracker, no global optimization of pose data, unfavorable miniaturization of the tracker, etc., and achieve the effect of accurate results and strong robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0030] The present invention will be described in detail below with reference to the drawings and embodiments.
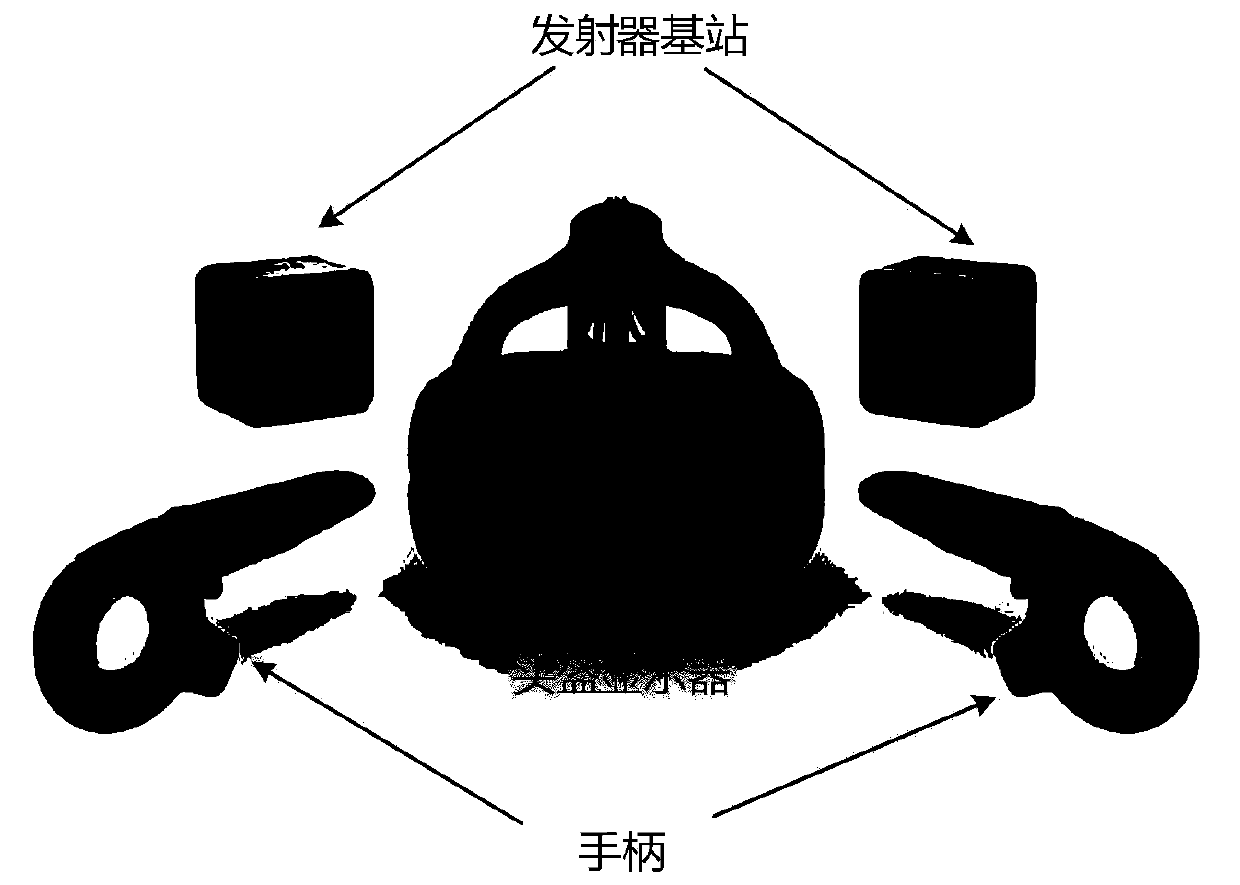
[0031] Such as figure 1 As shown, the HTC VIVE system includes a head-mounted display and two handles. There are dozens of photosensitive receivers installed on the helmet display and the handle. When the infrared light scanning signal of the base station is received by a certain number of receivers, the spatial position of the helmet display and the handle can be calculated to realize the user's posture tracking .
[0032] Let the three-dimensional coordinates of the j-th photosensitive sensor on the tracker in the world coordinate system be X wj =[x j , Y j ,z j ] T , Its corresponding image coordinate in the i-th transmitter base station is x ij =[u ij , V ij ] T , According to the principle of projection imaging, X wj With x ij The relationship satisfies the following formula:
[0033]
[0034] Where j = 1, 2, ... J, J is the number of sensors; Is coordinate X wj...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More