

Real-time splicing method for unmanned aerial vehicle aerial stereo images
An image and key frame technology, applied in the field of image processing, can solve the problems of high computational complexity and poor real-time performance of aerial photography, and achieve the effect of avoiding splicing dislocation, ensuring real-time splicing, and avoiding excessive overlap rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
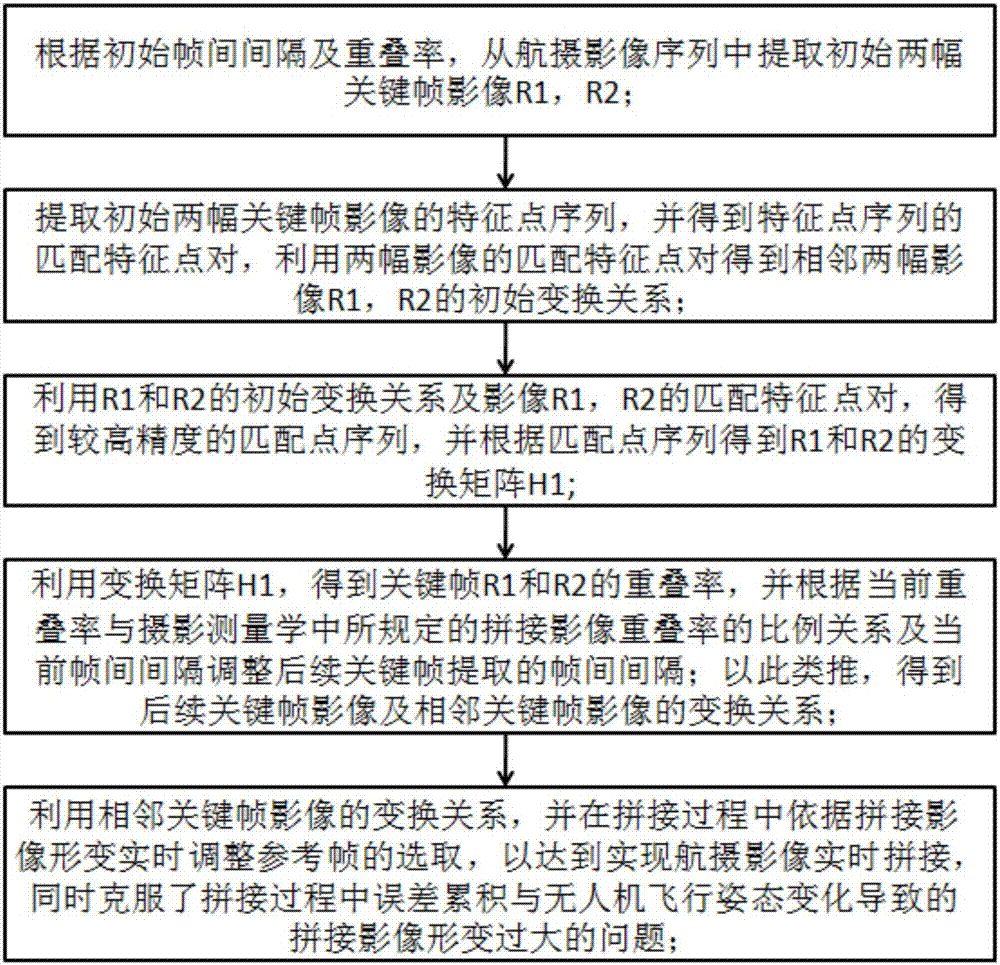
[0033] like figure 1 Shown, the present invention comprises a kind of real-time mosaic method of unmanned aerial vehicle aerial image, comprises the steps:
[0034] Step A) Set the initial reference frame R1 and the inter-frame interval Gap0 extracted from the initial key frame. The inter-frame interval Gap0 is set according to the requirements for the overlapping ratio of aerial photography images; the requirements for the overlapping ratio of aerial photography images have specific regulations. The overlap rate refers to the ratio of the part of the adjacent key frame image overlapping the former key frame image by the subsequent key frame image, which is defined as the prior art.
[0035] Step B) According to the inter-frame interval Gap0 extracted from the initial key frame, the key frame R2 is obtained from the sequence aerial image; in the existing aerial image sequence, the overlapping rate of adjacent aerial images is very high, if the Stitching will lead to computati...
Embodiment 2
[0046] This embodiment is preferably as follows on the basis of the above-mentioned embodiments: step F) calculate the overlap rate between adjacent key frame images according to the transformation relationship of adjacent key frame images, and then according to the current overlap rate and the stipulated in photogrammetry Stitching the proportional relationship of image overlap rate and the current inter-frame interval can realize real-time adjustment of the inter-frame interval of subsequent key frame extraction.
[0047] Step G) continuously dynamically adjust the reference frame during the splicing process, and then use the transformation relations H1, H2, ... Hn-1, n of adjacent key frame images to be positive integers to obtain the reference frame of each key frame image relative to the dynamic selection Then use this transformation relationship to transform each key frame image into the coordinate plane where the dynamically selected reference frame is located, so as to ...
Embodiment 3
[0052] This embodiment is preferably as follows on the basis of the above embodiment: in the above process of obtaining the transformation matrix H1, the feature point sequence S1 and the feature point sequence S2 are a rough matching relationship, that is, there is a mismatched matching feature point pair in the matching feature point pair , resulting in insufficient precision of the transformation matrix H1 obtained by the direct linear transformation algorithm. In order to improve the accuracy of the above transformation matrix H1, according to the existing transformation relationship H1, the error of each matching feature point pair is reversely calculated, that is, after step D) is completed, it is necessary to use the obtained coordinate matching relationship to reversely eliminate the matching error. Matching feature point pairs that meet the requirements, get new feature point sequences S1 and S2 whose errors meet the requirements, and then re-solve the transformation mat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More