

Parallel multi-manipulator mechanism
A multi-operation, mobile phone technology, applied in the field of robotics, to achieve the effect of simple and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
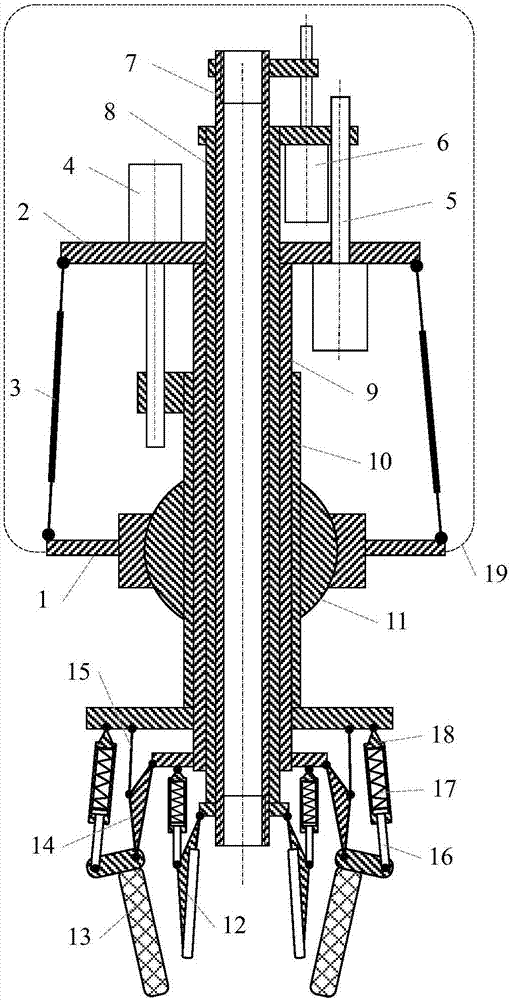
[0015] exist figure 1 In the schematic diagram of the parallel multi-operator mechanism shown, the machine base 1 is provided with a central concave spherical through-hole and 4 circumferentially uniformly distributed ball sub-seats, the moving table 2 is provided with a central through-hole and 4 circumferentially uniformly distributed ball sub-seats, and 4 Two SPS-type linear drive branches with the same structure are evenly distributed on the circumference between the machine base and the moving table, and the two ends of the SPS-type linear drive branch 3 are connected with the machine base and the moving table; Center, the set includes a heart tube 7, an inner sleeve 8, a fixed sleeve 9, an outer sleeve 10 and a ball sleeve 11, the heart tube and the inner sleeve, the inner sleeve and the fixed sleeve, the fixed sleeve and the outer sleeve, and the outer sleeve and the ball sleeve from the inside One end of the fixed sleeve is vertically fixed to the outer periphery of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More