

Robot positioning method and system fusing monocular vision and encoder information
A technology for robot positioning and monocular vision, which is applied to instruments, image analysis, and complex mathematical operations. The effect of eliminating accumulated errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the above-mentioned features and effects of the present invention more clear and understandable, the following specific examples are given together with the accompanying drawings for detailed description as follows.
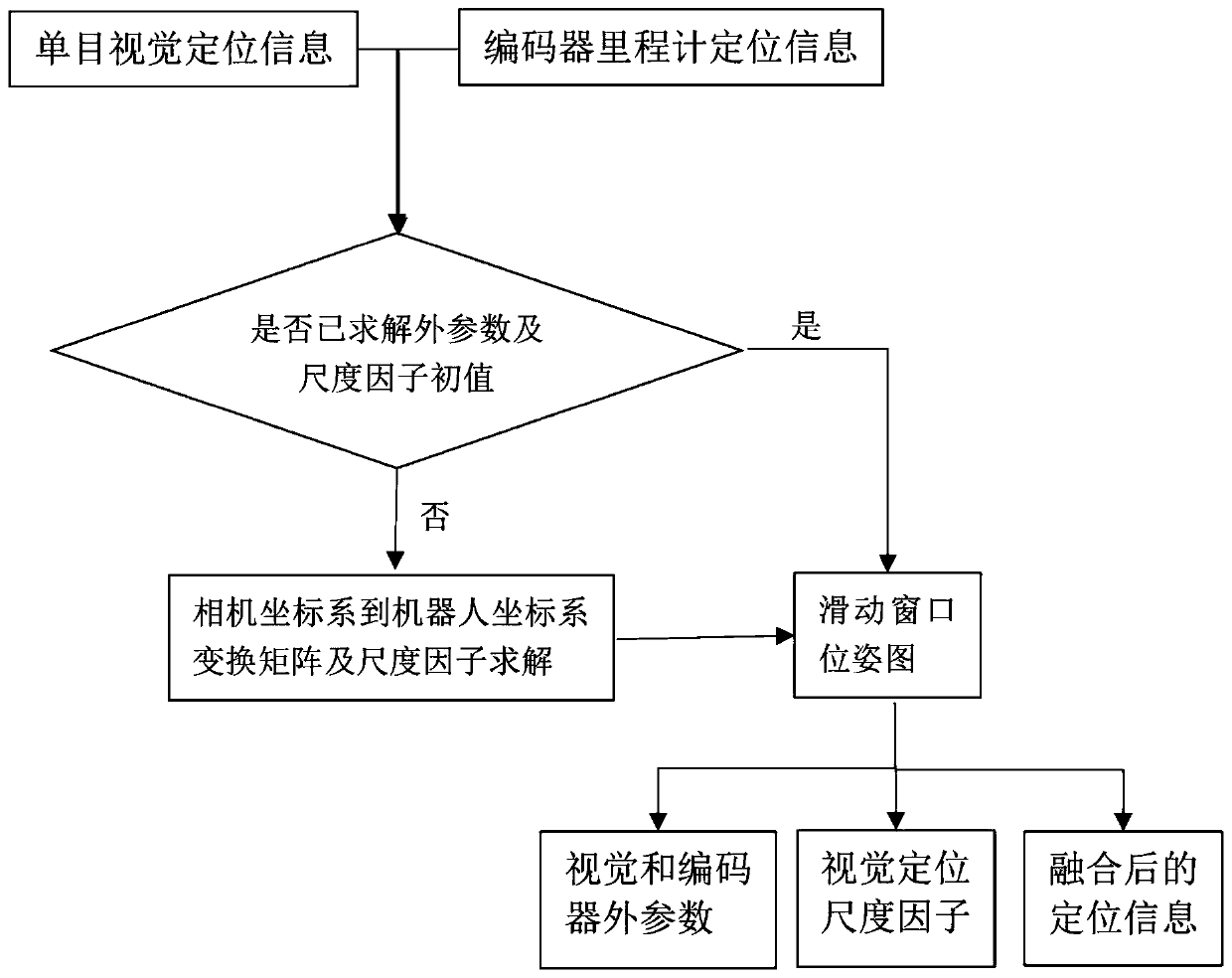
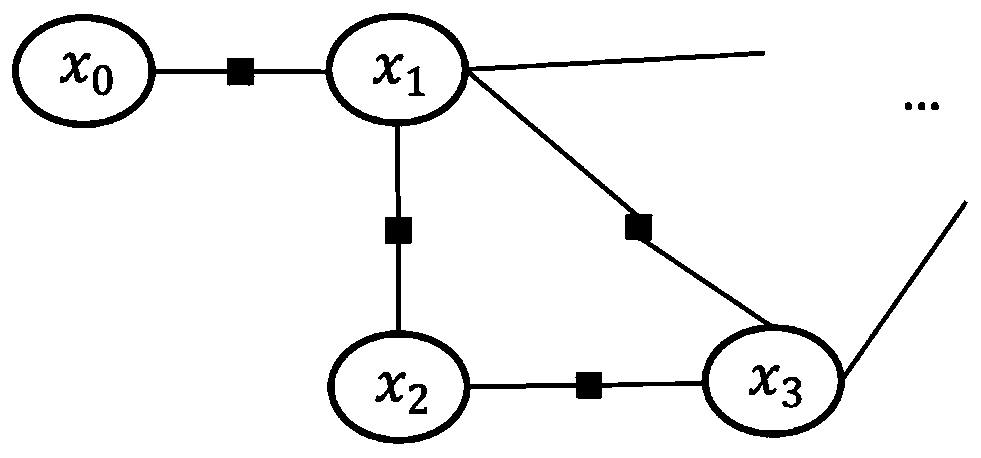
[0029] as attached figure 1 A schematic flow chart of the present invention is shown. First, the positioning information calculated by the encoder and the monocular vision module is used to solve the external parameter matrix between the camera coordinate system and the robot coordinate system and the initial value of the scale factor. After the calculation is completed, the sliding window pose graph is constructed by using the initial value and the positioning information of each module, and the optimized external parameter matrix, scale factor, and positioning information are obtained by solving the pose graph through nonlinear least squares.
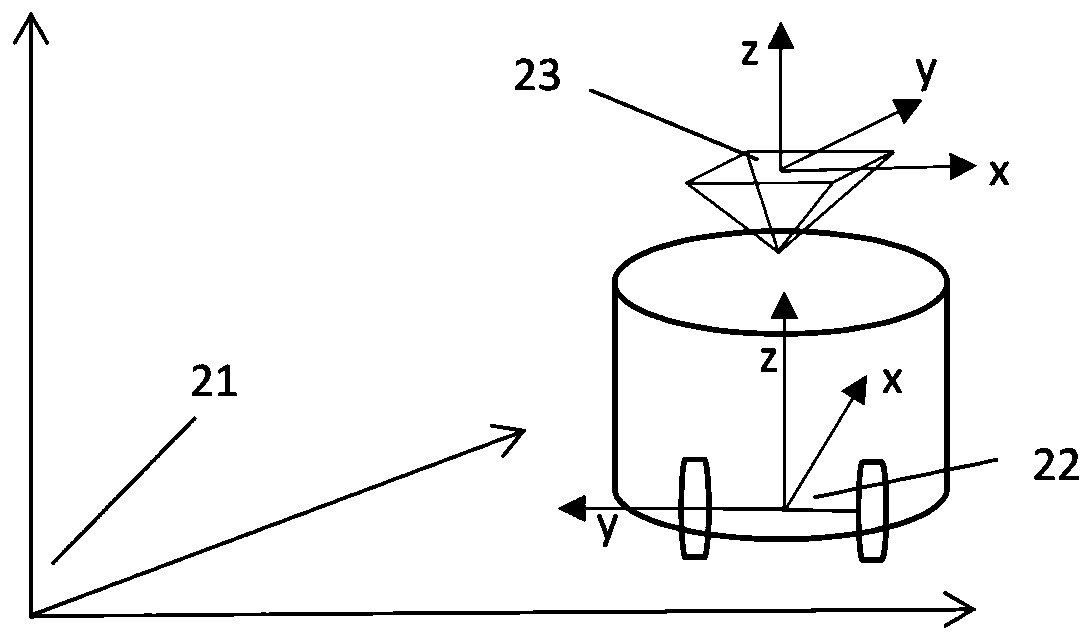
[0030] attached figure 2 Among them, 21 is the world coordinate system, 22 is the robot coor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More