

Unmanned surface vehicle and robotic fish shoal master-slave collaboration system
A collaborative system, unmanned boat technology, applied in radio relay systems, transmission systems, active electrical relay systems, etc., can solve the problems of restricting the effect of the robot fish to perform tasks, complex working environment, and high degree of information attenuation. , to achieve the effect of improving the operating radius, enhancing the power, and expanding the detection area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
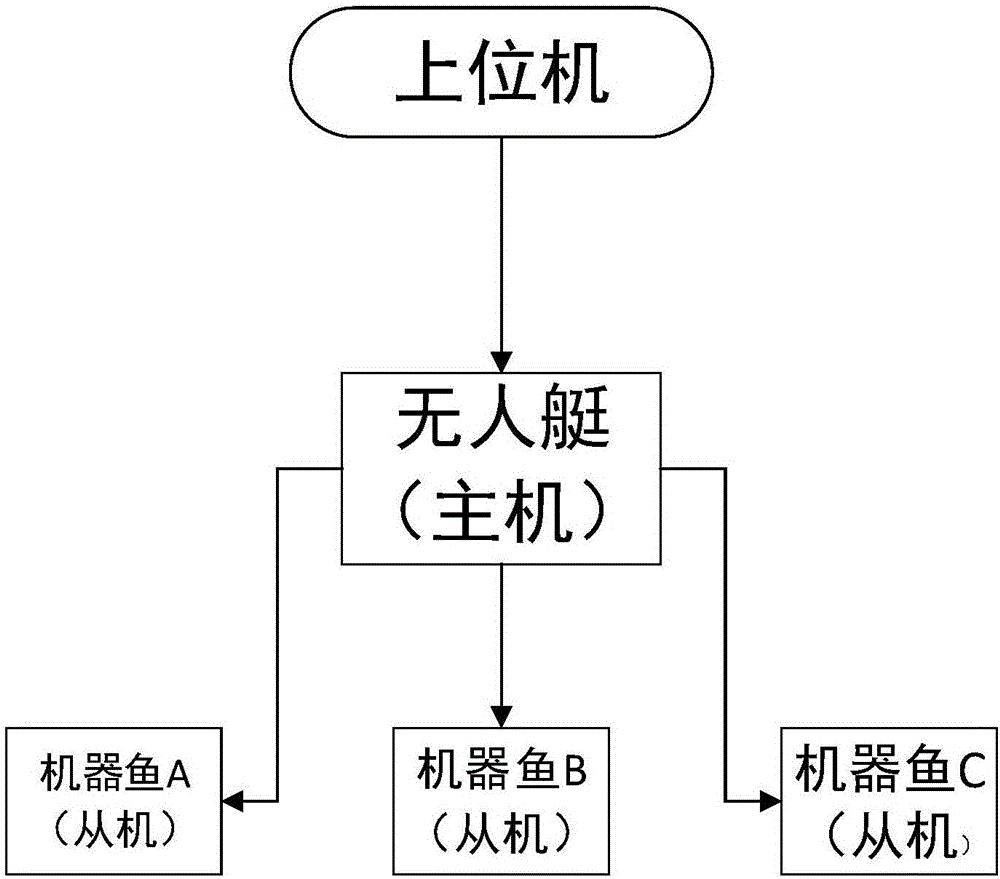
[0015] The present invention will be further described below in conjunction with the accompanying drawings. Such as figure 1 As shown, the working method of the present invention is as follows: the software installed in the upper computer of the present invention includes the real-time unmanned boat trajectory control interface, the position formation relationship control system of the unmanned boat and the robotic fish, and the return information interface; the unmanned boat trajectory The control interface sets information such as the track and position of the unmanned boat, the positional relationship between the unmanned boat and the robotic fish school, and the corresponding detector detection indicators, and transmits the instructions to the unmanned boat through the wireless communication module of the unmanned boat; The boat obtains the control information of the upper computer through the wireless communication module. After processing the information, it performs the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More