

Underwater robot sliding mode control method based on adaptive backstepping
A technology of underwater robot and control method, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of poor practicability, achieve good practicability, realize high-precision tracking control, and improve robustness Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
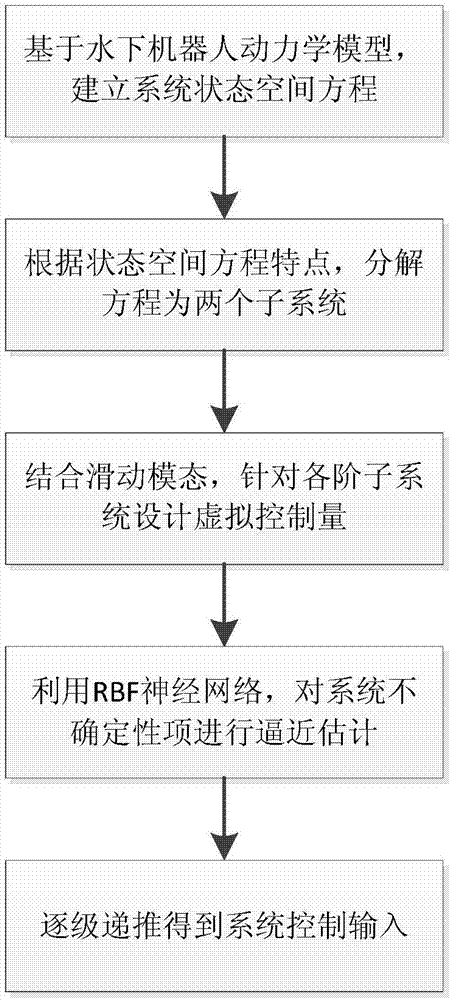
[0038] refer to figure 1 . The concrete steps of the underwater robot sliding mode control method based on the self-adaptive backstepping method of the present invention are as follows:
[0039] Step 1. Consider the forward and heading dynamics model of the six-degree-of-freedom underwater robot:
[0040]
[0041] where m x and m ψ are forward inertia parameters and heading inertia parameters respectively, d L,x 、d L,ψ is the first-order forward damping parameter and the heading damping coefficient, d Q,x 、d Q,ψ is the second-order forward damping parameter and heading damping coefficient, τ x and τ ψ are forward thrust and heading thrust respectively, F u , F r are forward disturbance force and heading disturbance force; v x are the forward acceleration and forward velocity, v ψ are the heading acceleration and heading speed;
[0042] From the Handbook of Underwater Robots:
[0043] m x =236.53kg;
[0044] m ψ =30.04kg·m2 ;
[0045] d L,x =22.21N (m / ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More