

Punch feeding and discharging auxiliary device
An auxiliary device, punching technology, applied in the direction of feeding device, positioning device, storage device, etc., can solve the problems of boring working process, increasing motor power and moment of inertia, occupying large volume, etc., to reduce the frequency, shorten the movement distance, The effect of increasing the number of sheets
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
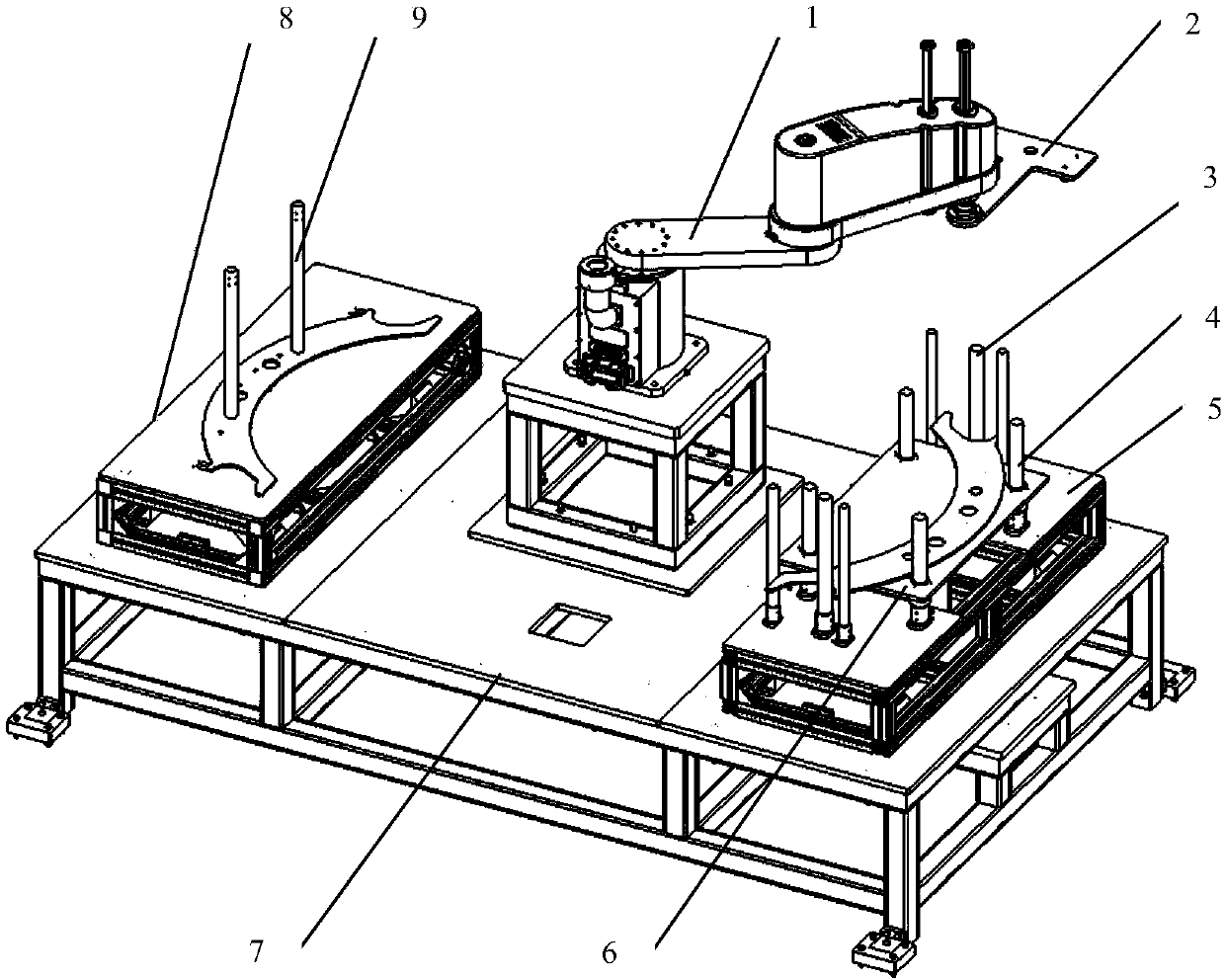
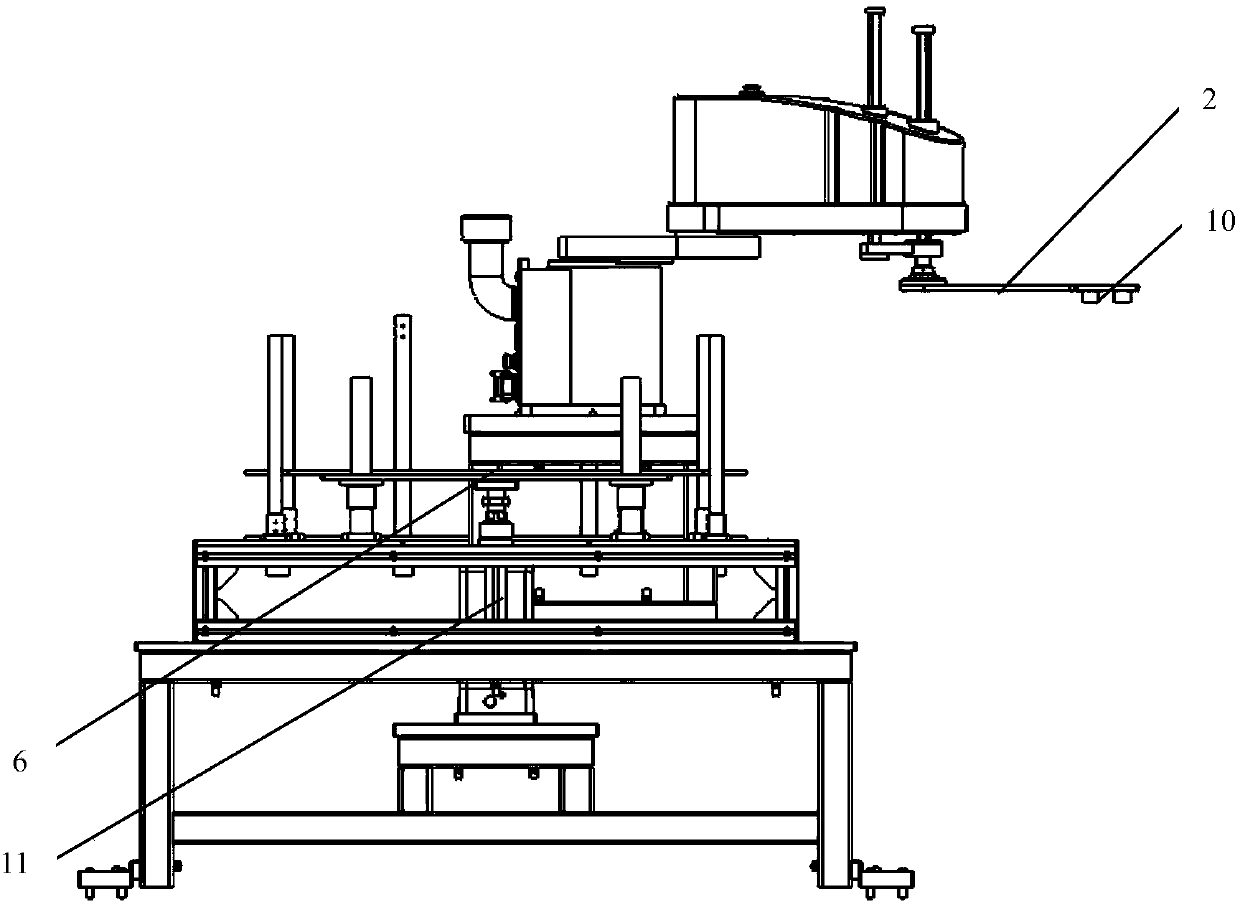
[0012] like Figure 1-Figure 2 As shown, an auxiliary device for loading and unloading on a punching machine includes an installation stand 7, a control cabinet, a four-axis industrial robot 1, a feeding tray and an unloading tray, and the control cabinet is fixed on the bottom of the installation stand 7. In this embodiment, the four The four-axis industrial robot 1 is a SCARA robot, the four-axis industrial robot 1 is installed on the installation stand 7, the end mounting plate 2 is fixed on the end effector of the four-axis industrial robot 1, and the electromagnetic chuck 10 is installed on the end mounting plate 2. Axis industrial robot 1 is arranged between the feeding tray and the unloading tray.
[0013] The control cabinet includes electrical control components, and the control cabinet is used to control the action process of the entire device.
[0014] The four-axis industrial robot 1 has a degree of freedom of movement in the XYZ direction and a degree of freedom ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More