

Binocular visual sense mileage calculating method based on image gradient combined optimization
A binocular vision and image gradient technology, applied in the field of computer vision, can solve problems such as weak performance, limited theoretical convergence area, imperfect camera calibration, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] The technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
[0082] In order to make the object, technical solution and advantages of the present invention clearer, the embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
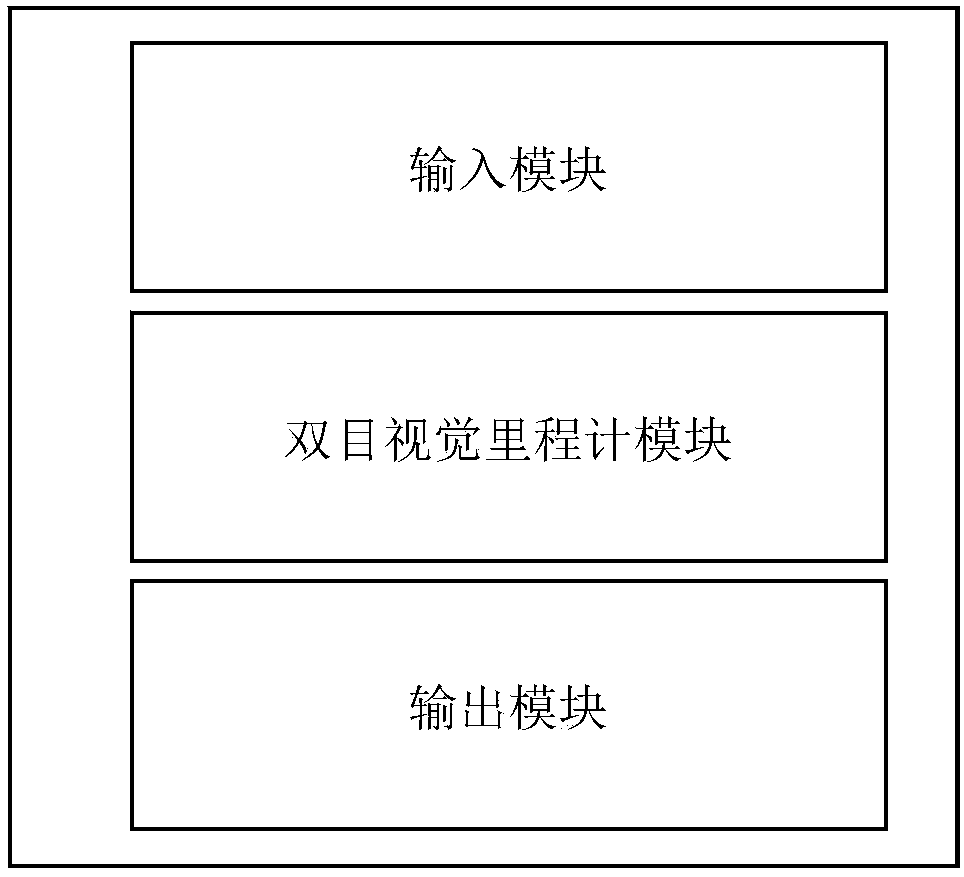
[0083] Such as figure 1 As shown, the system modules specifically implemented in the embodiment of the present invention are:
[0084] The input module is used to receive the binocular video sequence provided by the user, and then send it to the visual odometry module for camera pose estimation.
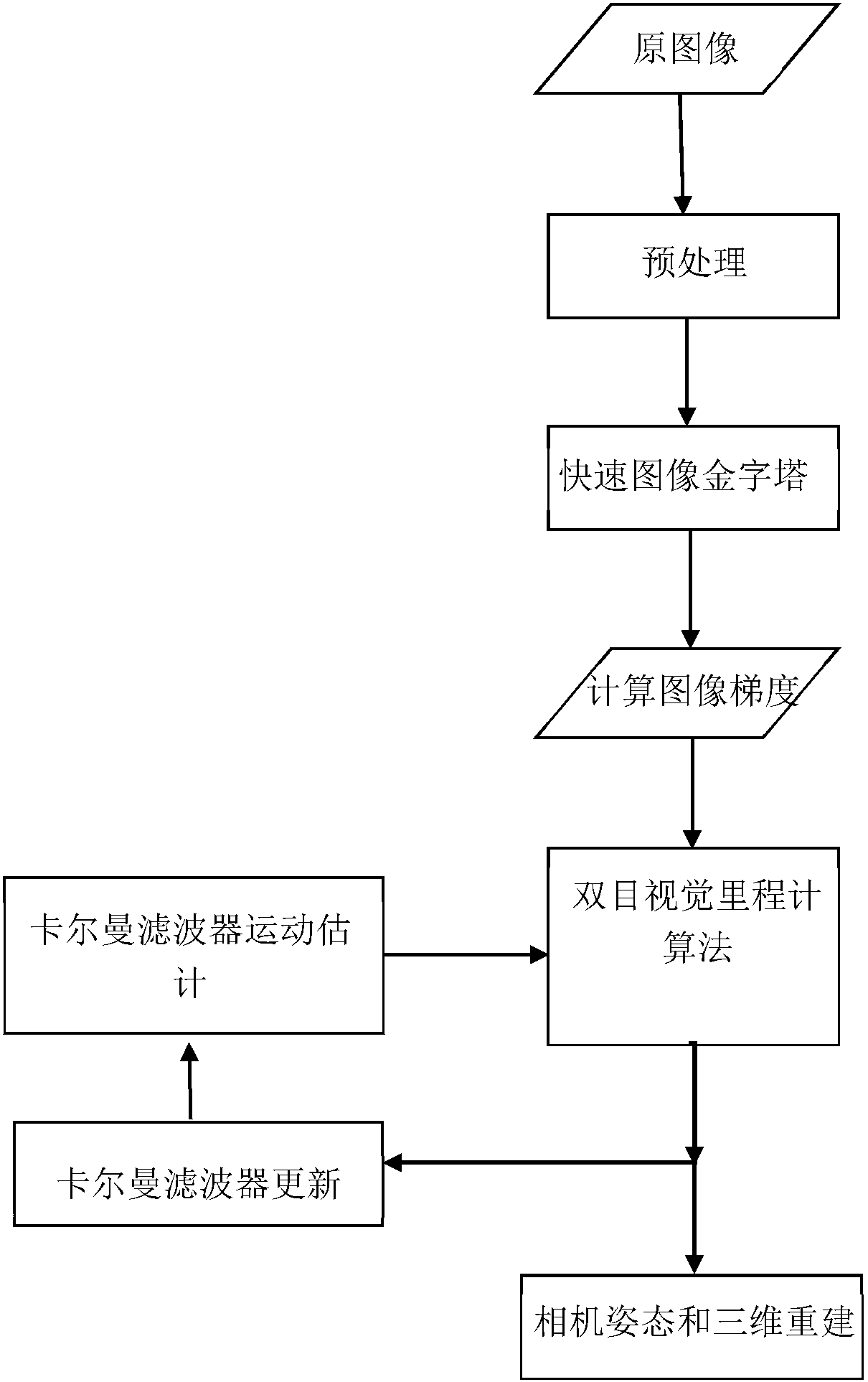
[0085] The visual odometry module preprocesses the received video frames, and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More