

Unmanned aerial vehicle and ground robot coordinated formation realization method and system
A technology of robots and unmanned aerial vehicles, applied in general control systems, control/adjustment systems, instruments, etc., to achieve the effects of avoiding financial investment, improving stability and reliability, and high practical value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
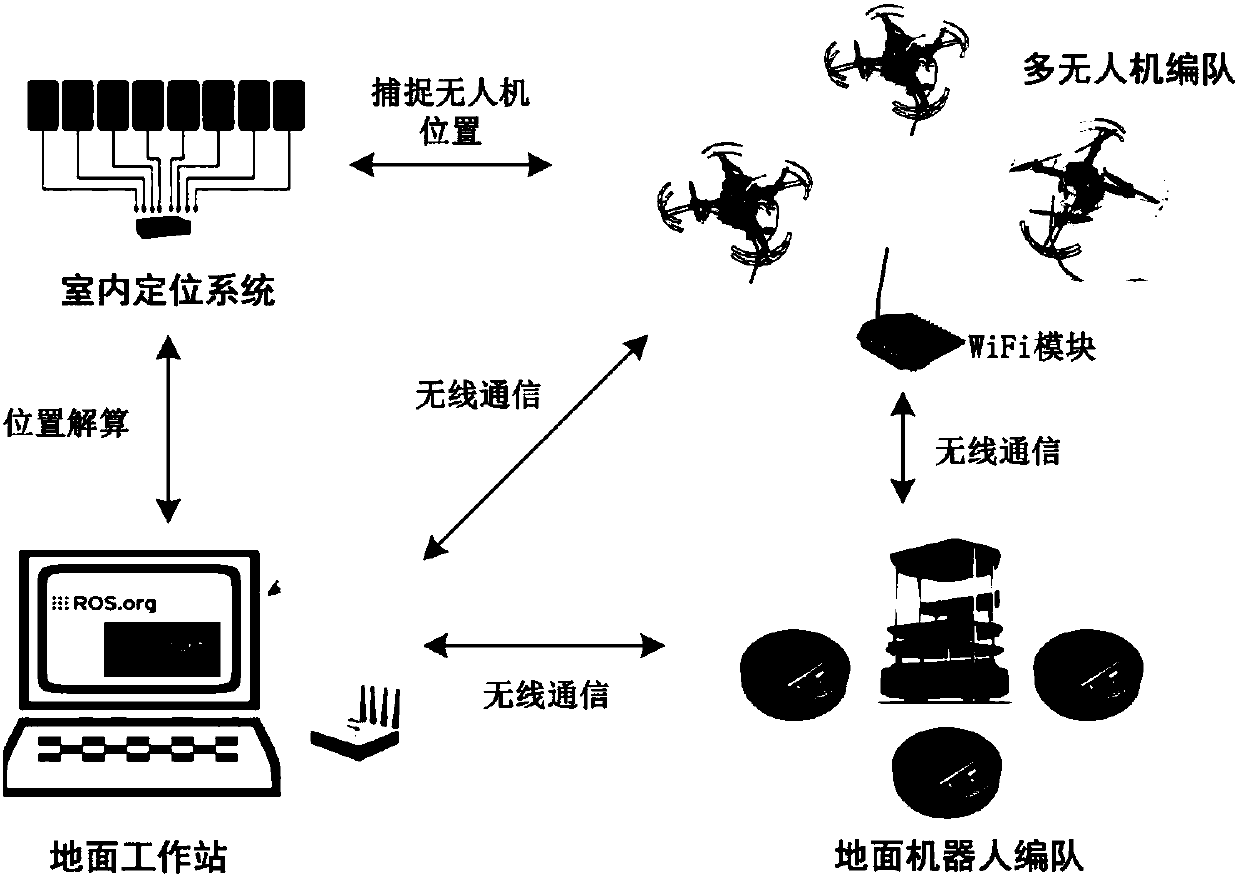
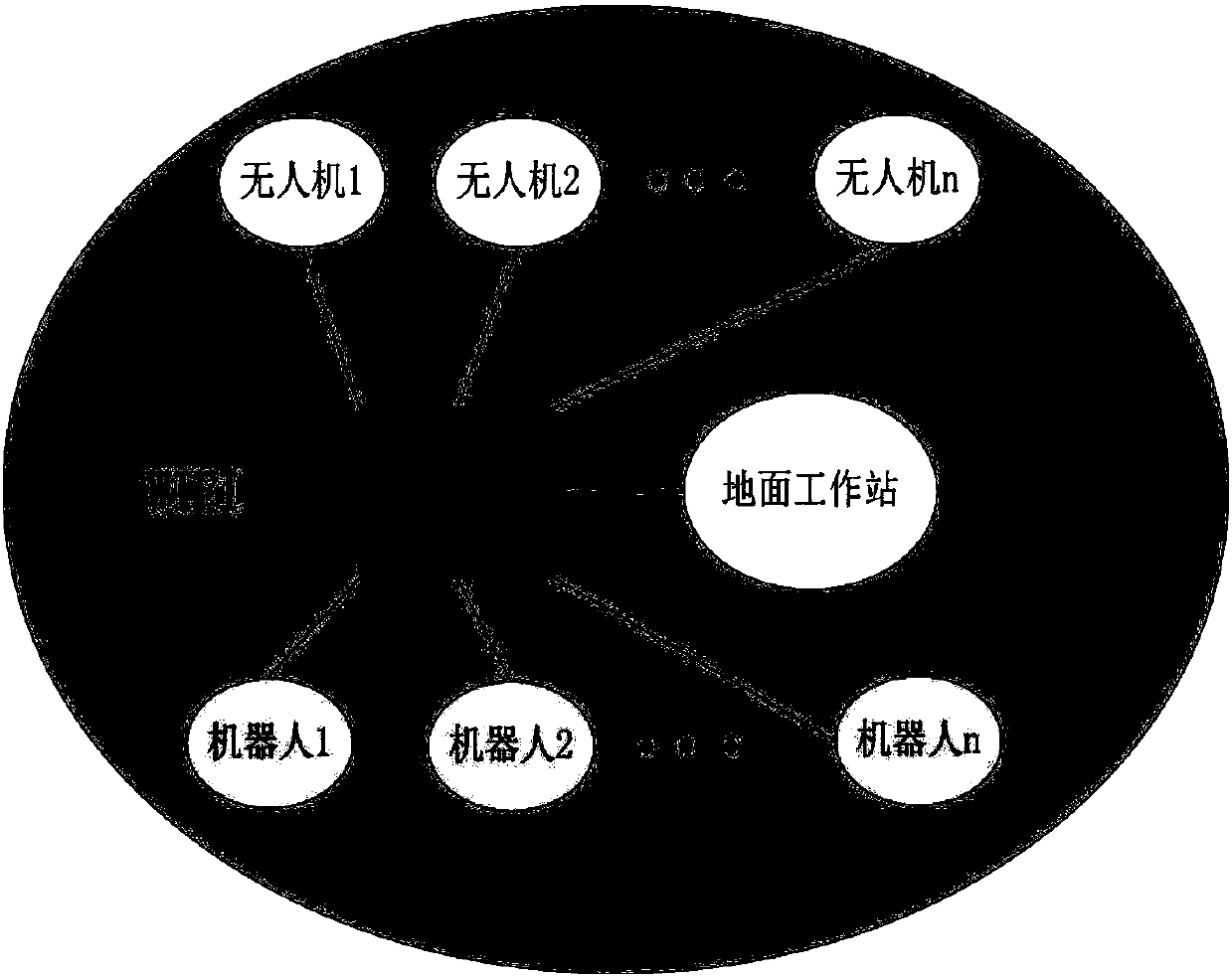
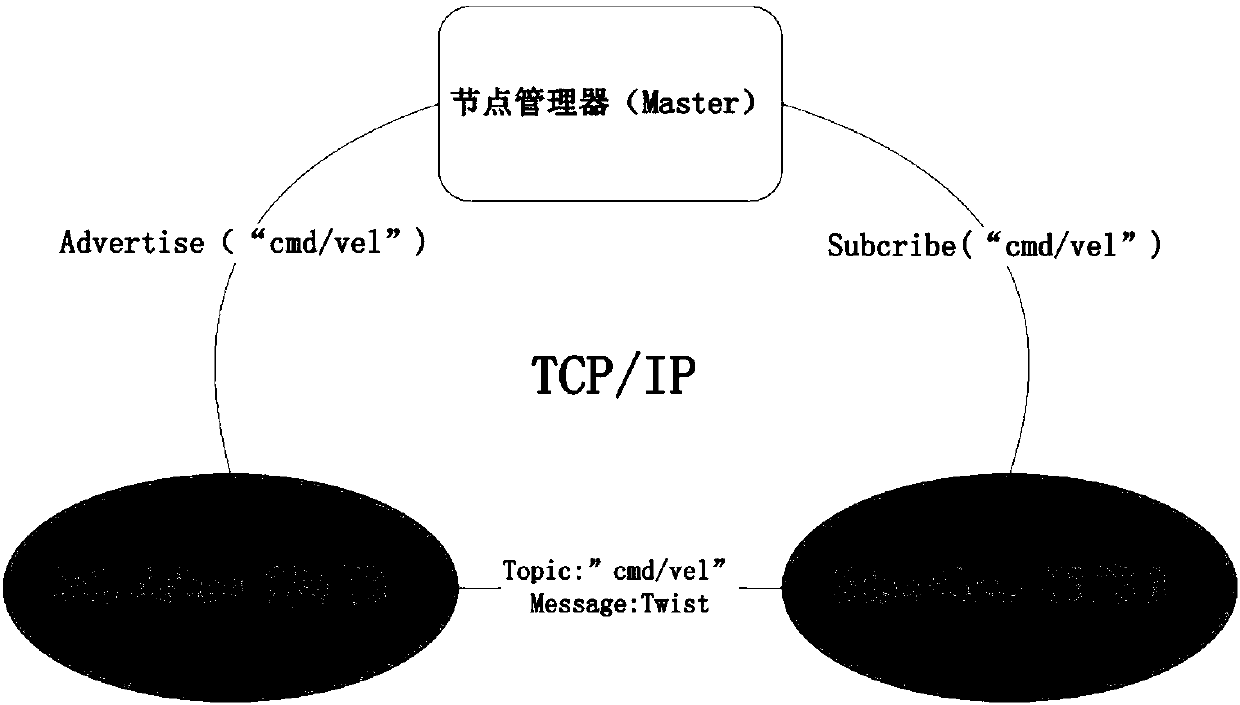
[0050] The invention relates to the field of cooperative formation of unmanned aerial vehicles and ground robots, the field of wireless data transmission communication, and the field of embedded development technology. A hardware platform is provided for the writing of the air-ground cooperative formation algorithm.
[0051] Aiming at the problems existing in the prior art, the present invention aims to provide a system with good scalability, strong stability, and the ability to support the cooperative formation of UAVs and ground robot platforms, so that researchers can use the system to conduct air-ground collaborative formations. The algorithm is verified by physical simulation and experiment. On this basis, the present invention proposes a UAV and ground robot cooperative formation control algorithm based on potential field function, which can realize the air-ground cooperative formation of UAV and ground robot. The invention is beneficial to repeated parameter correction...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More