

VR system control-based industrial robot teaching system and teaching method thereof
An industrial robot and robot system technology, which is applied to the industrial robot teaching system and its teaching field, can solve the problems of high physical exertion of operators, impact on the personal safety of operators, and easy generation of fatigue, so as to improve the teaching accuracy, The effect of improving work enthusiasm and improving precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further elaborated below.
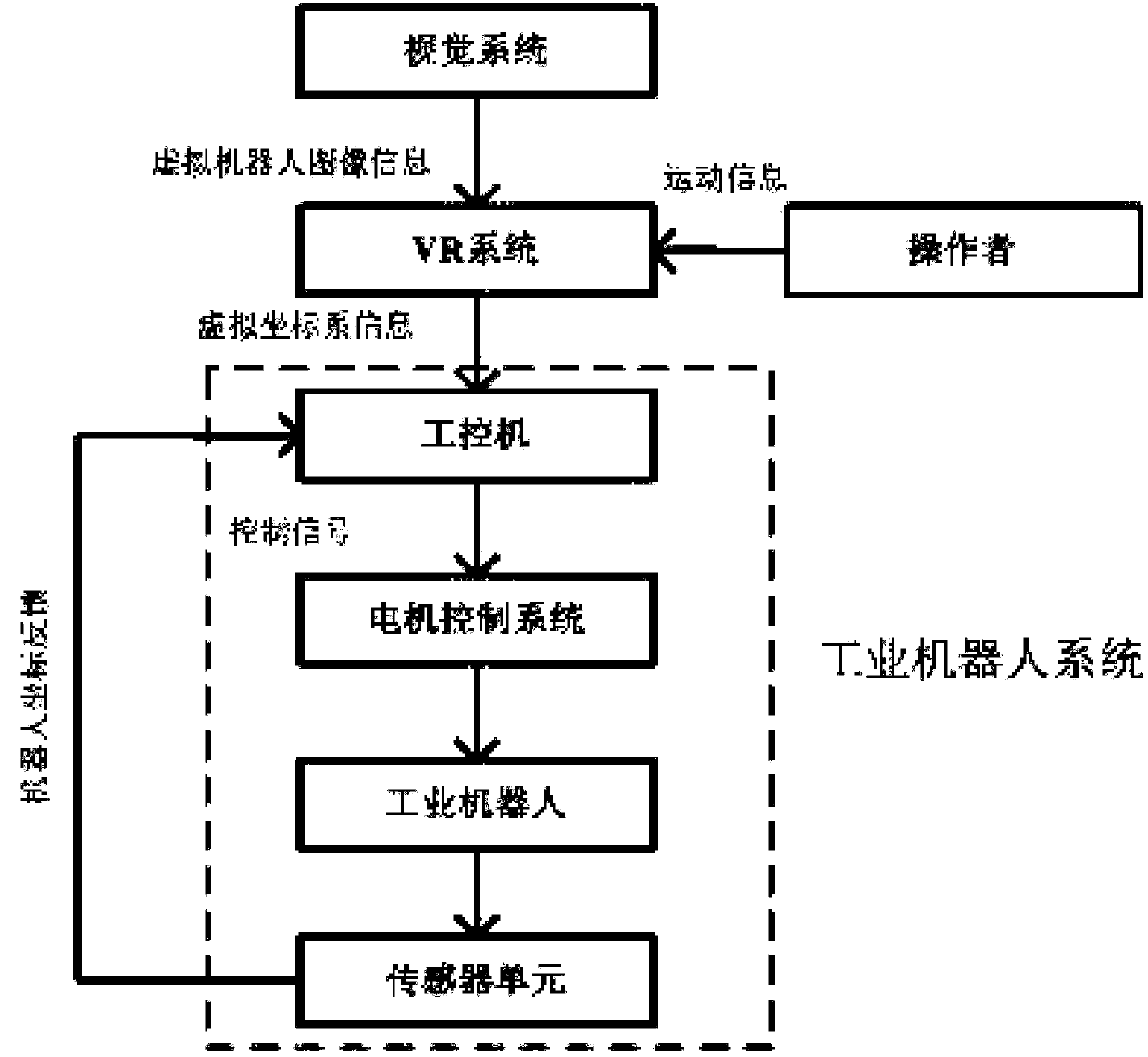
[0026] like figure 1 As shown, the industrial robot teaching system based on VR system control includes: vision system, VR system, and robot system.
[0027] The vision system is used to collect the overall structure of the industrial robot, analyze and process it and parameterize its image information, and transmit it to the VR system through Ethernet in TCP / IP mode.
[0028] The VR system uses the image information acquired by the visual system to approximate the structural model of the actual robot in the virtual scene and can realize the simulated movement, and transmits the data to the robot system through EtherCAT and Modbus communication methods.
[0029] The robot system controls the robot to move according to the changing position information transmitted by the VR system.
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More