

Robot teaching method and robot
A teaching method and robot technology, applied in the direction of robots, instruments, manipulators, etc., can solve the problem of not being able to specify the position of the image sensor beam direction, and achieve the effect of improving the teaching accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] (first embodiment)
[0037] Hereinafter, a first embodiment of the present invention will be described with reference to the drawings. Hereinafter, the same reference numerals are attached to the same or corresponding elements in all the drawings, and repeated explanations are omitted.
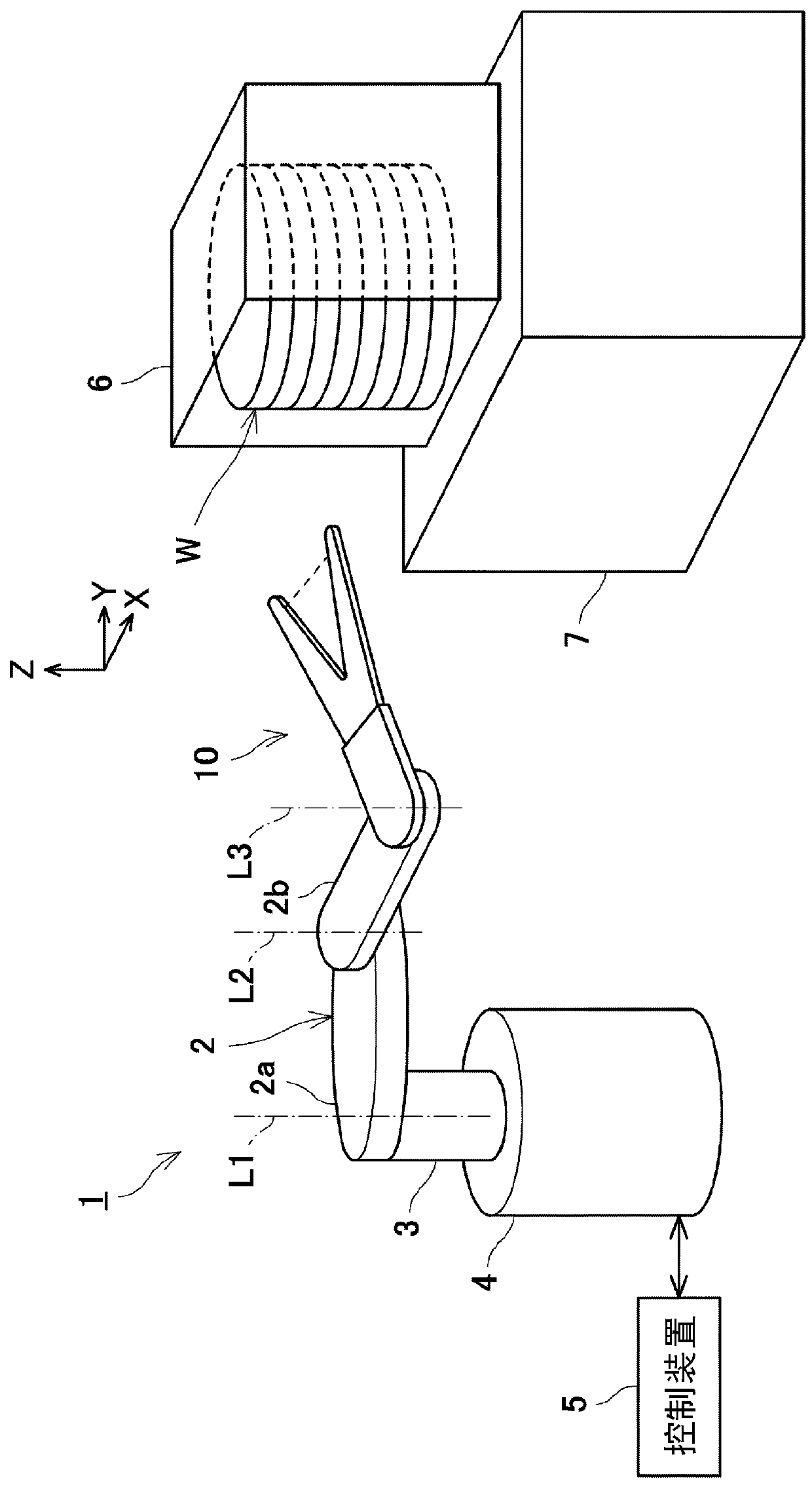
[0038] figure 1 It is a schematic diagram showing the structure of the robot 1 of the first embodiment. Such as figure 1 As shown, the robot 1 is used, for example, to transport a substrate W such as a wafer, which is a material of a semiconductor package, in a semiconductor processing facility for manufacturing a semiconductor package. Wafers include semiconductor wafers and glass wafers. Semiconductor wafers include, for example, silicon wafers, wafers of other semiconductor monomers, and wafers of compound semiconductors. Glass wafers include, for example, glass substrates for FPDs, glass substrates for MEMS, and sapphire (single crystal alumina) wafers. A semiconductor process...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More