

Robot teaching recording system, teaching process steps and algorithm flow of robot teaching recording system
A robotic system and recording system technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems that the robot movements cannot be pre-calculated, the operator's knowledge level is high, and the applicability is not high, so as to reduce the knowledge reserve. requirements, reduced installation steps, and the effect of flexible applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
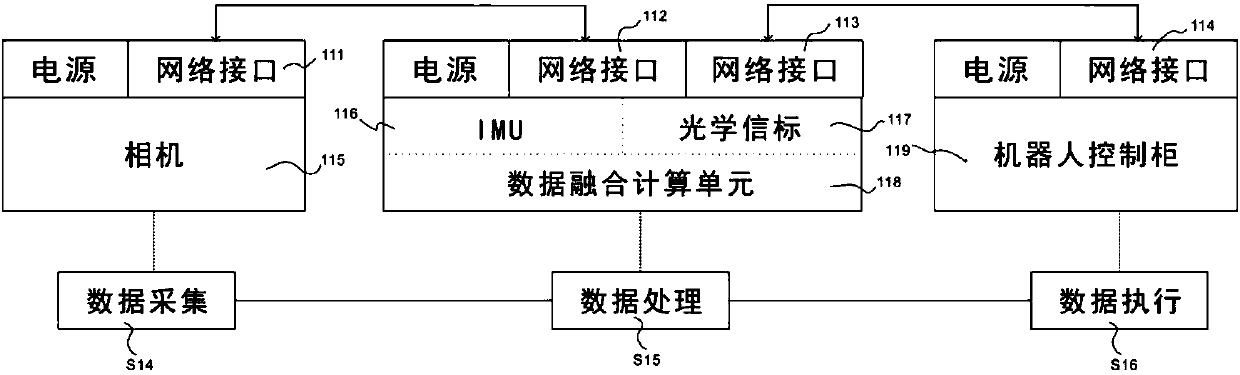
[0064] Such as figure 1 As shown, the robot teaching and recording system of the present invention is composed of an optical beacon 117, an IMU sensor 116, a camera 115, and a data fusion computing unit 118. The teaching actuator 119 is composed of an IMU sensor 116, an optical beacon 117, and a data fusion computing unit. Unit 118 consists of:
[0065] The optical beacon 117, the IMU sensor 116 and the data fusion calculation unit 118 are installed together, and six optical beacons 117 are installed at different positions, and the spatial encoding of the installation positions of the optical beacons 117 adopts a hexagonal uniform distribution method, The camera unit is installed separately and operated by the teaching worker;
[0066] The camera is used to collect the position of the beacon, and the motion data of the beacon is transmitted through the data exchange network between the IMU sensor 116 and the optical beacon 117 unit and the camera 115, and the data of the IMU ...
Embodiment 2
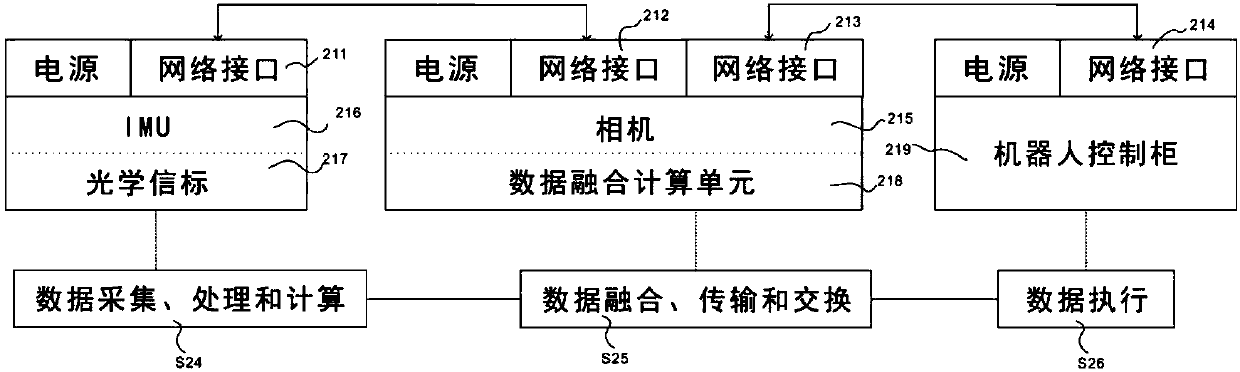
[0085] Such as image 3 As shown, the robot teaching and recording system of the present invention is composed of an optical beacon 217, an IMU sensor 216, a camera 215, and a data fusion computing unit 218, and the teaching actuator is composed of an IMU sensor 216 and an optical beacon 217, wherein:
[0086] The optical beacon 217 and the IMU sensor 216 are fixedly installed together, and six optical beacons 217 are installed at different linear positions. The spatial encoding of the installation position of the optical beacon 217 adopts a randomly generated uneven distribution method, and the data fusion calculation Unit 218 and camera unit 215 are mounted together and operated by a teaching worker;
[0087] The camera 215 is used to collect the position of the beacon, and the IMU data is transmitted through the data exchange network between the IMU sensor 216 and the optical beacon 217 unit and the camera 215, and the data of the IMU sensor 216 is fused by the data fusion ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More