

A space spiral motion device
A technology of spiral motion and space, applied in the direction of measuring devices, instruments, measuring instrument components, etc., can solve the problems of fixed motion parameters, high degree of flexibility, complex drive structure, etc., and achieve low manufacturing and processing costs and a high degree of flexibility The effect of high, simple driving structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
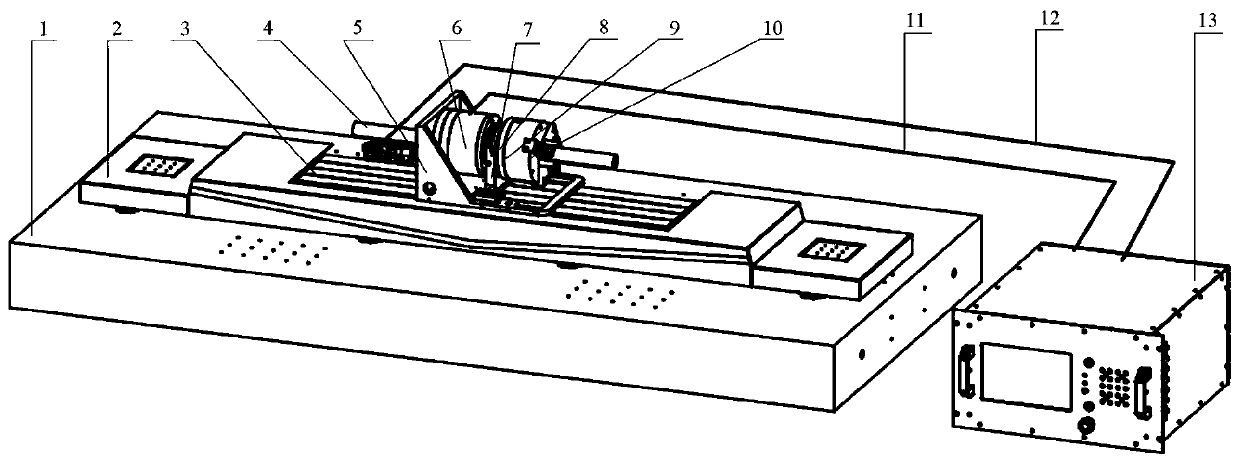
[0028] as attached figure 1 As shown, a space spiral movement device includes a base 1 and a control cabinet 13 arranged on one side of the base 1, and also includes a linear displacement module 3 fixedly installed on the base 1, and one part of the linear displacement module 3 The side is connected with the first power supply control line 12 connected to the corresponding interface of the control cabinet 13, and the linear displacement module 3 realizes the linear reciprocating motion of the device through the program set by the control cabinet 13;
[0029] The rotating mechanism placed above the linear displacement module 3, the rotating mechanism reciprocates linearly with the linear displacement module 3, and the second power control line 11 connected to the corresponding interface of the control cabinet 13 is connected to the rotating mech...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More