

Underwater robot
A technology of underwater robots and thrusters, which is applied to underwater operation equipment, manipulators, ships, etc., can solve the problems of underwater robots moving up and down, insufficient light, and affecting video imaging effects, etc., to achieve stable underwater operation and launch The effect of small angle and improved image quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
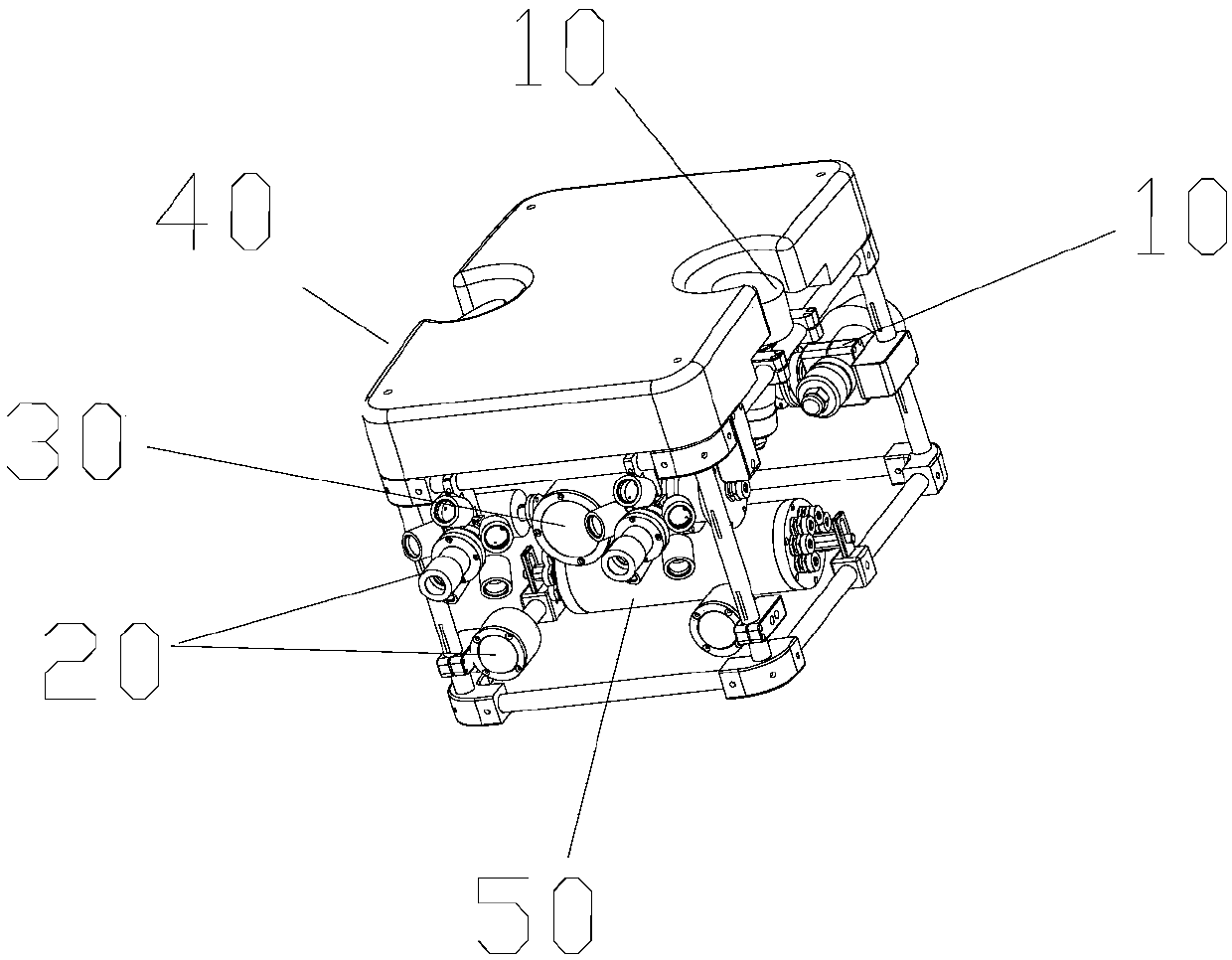
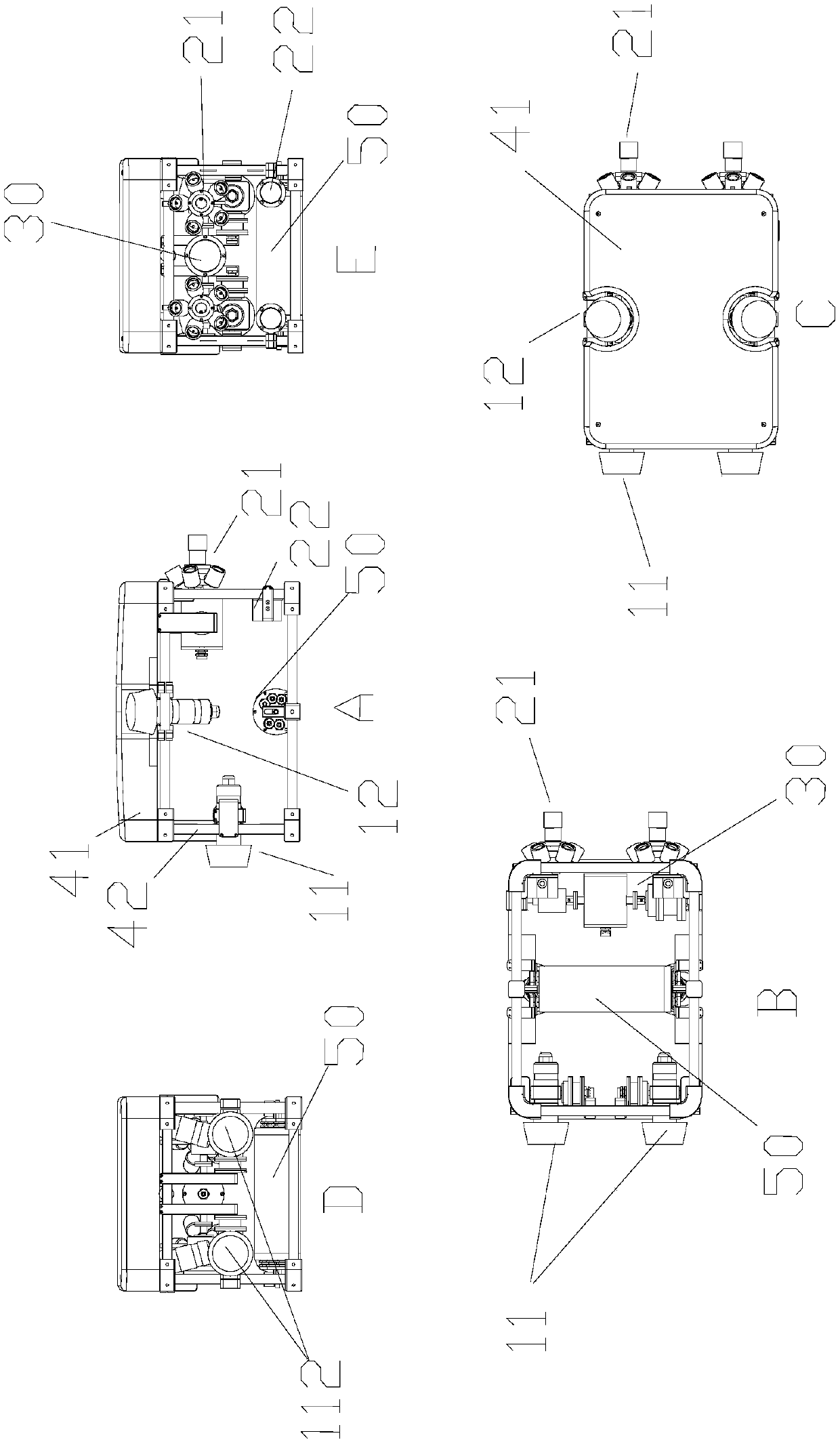
[0075] An underwater robot such as Figure 1-9 As shown, a support body, a propulsion system 10 capable of correcting routes, a light compensation system 20 with less divergence and strong penetrating power, a camera mechanism 30 and a detection mechanism are provided. The propulsion mechanism, light compensation system 20, camera mechanism 30 and detection mechanism The mechanisms are respectively fixedly installed on the frame body.
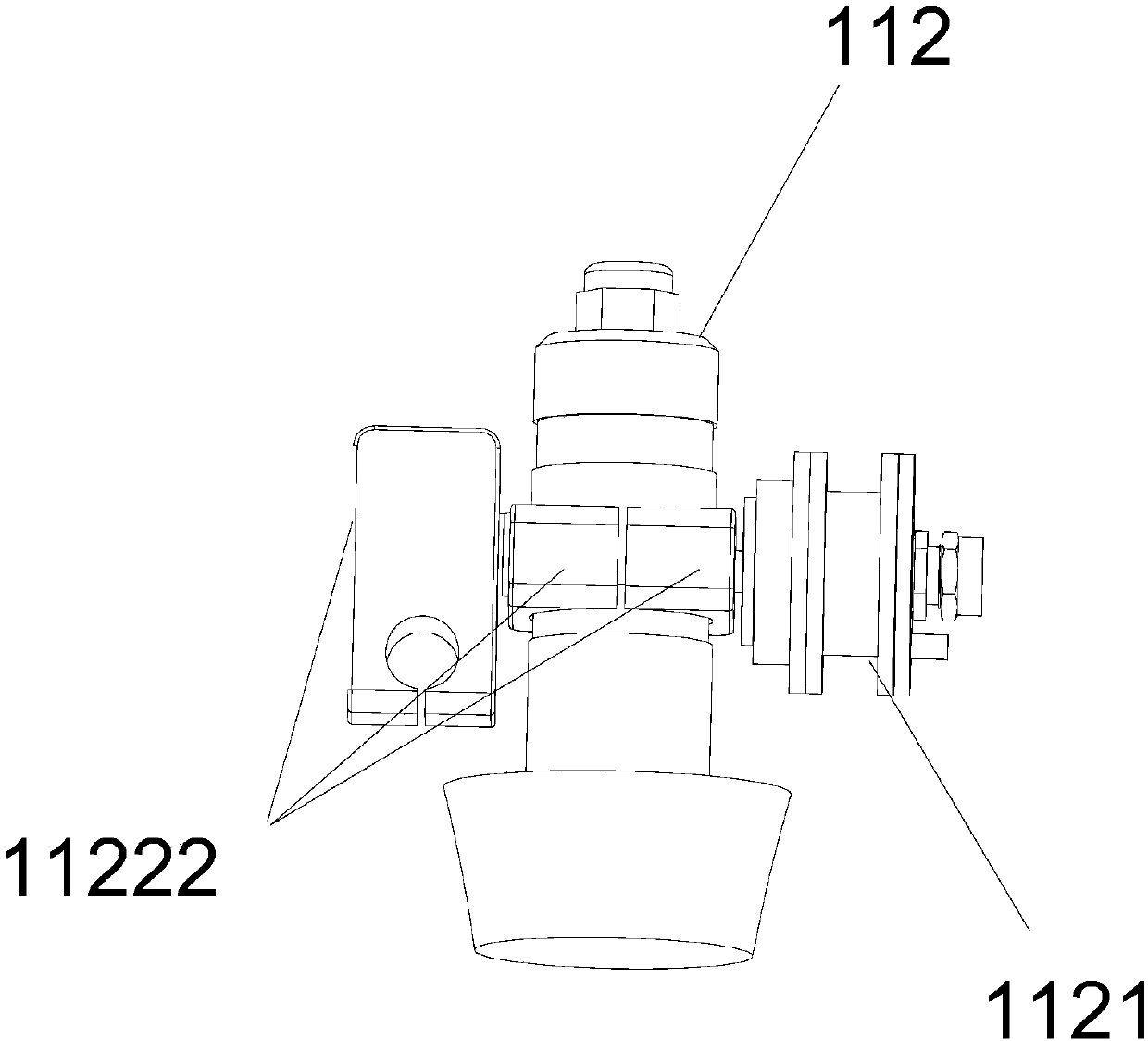
[0076] The propulsion system 10 is provided with a plurality of first propulsion mechanisms 11 and a plurality of second propulsion mechanisms 12 . The side where the camera mechanism 30 is located is defined as the front of the frame, and the first propulsion mechanism 11 is fixedly installed on the side opposite to the front of the frame, and this side is defined as the back of the frame. The second propulsion mechanism 12 is provided with a second propeller, and the second propeller is fixedly installed on the side of the frame and the side...
Embodiment 2
[0100] A kind of underwater robot, other characteristics are identical with embodiment 1, and difference is, the second subseat 2112 is provided with 3.
[0101] The light compensation range of the second light compensation mechanism 22 in this embodiment is wider, and it is more effective for the camera mechanism 30 .
[0102] The underwater robot has a propulsion system 10 that can be used to correct the route, and can automatically detect whether it deviates from the route when the underwater machine is acting underwater, and automatically adjust the angle of the propeller to make the underwater robot stable. At the same time, the optical compensation system 20 of the present invention has the ability to absorb scattered light and has a small emission angle and strong penetrating ability to effectively reduce the reflected light in the front and rear directions. The underwater robot has the characteristics of stable underwater operation, and at the same time can avoid the i...
Embodiment 3
[0104] An underwater robot, other features are the same as in Embodiment 2, the difference is that the center of gravity of the underwater robot and the total acting point of the buoyancy are on the same vertical line.
[0105] The operation of the underwater robot of this embodiment is more stable than that of Embodiment 1 and Embodiment 2.
[0106] The underwater robot has a propulsion system 10 that can be used to correct the route, and can automatically detect whether it deviates from the route when the underwater machine is acting underwater, and automatically adjust the angle of the propeller to make the underwater robot stable. At the same time, the optical compensation system 20 of the present invention has the ability to absorb scattered light and has a small emission angle and strong penetrating ability to effectively reduce the reflected light in the front and rear directions. The underwater robot has the characteristics of stable underwater operation, and at the sa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More