

Robot multi-fingered hand, robot arm and robot
A robot and dexterous hand technology, applied in the field of robotics, can solve the problems of unfavorable function realization and movement stability, complex structure, dexterity and low grasping accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] It should be noted that, in the case of no conflict, the embodiments of the present invention and the features in the embodiments can be combined with each other. The present invention will be described in detail below with reference to the accompanying drawings and examples.
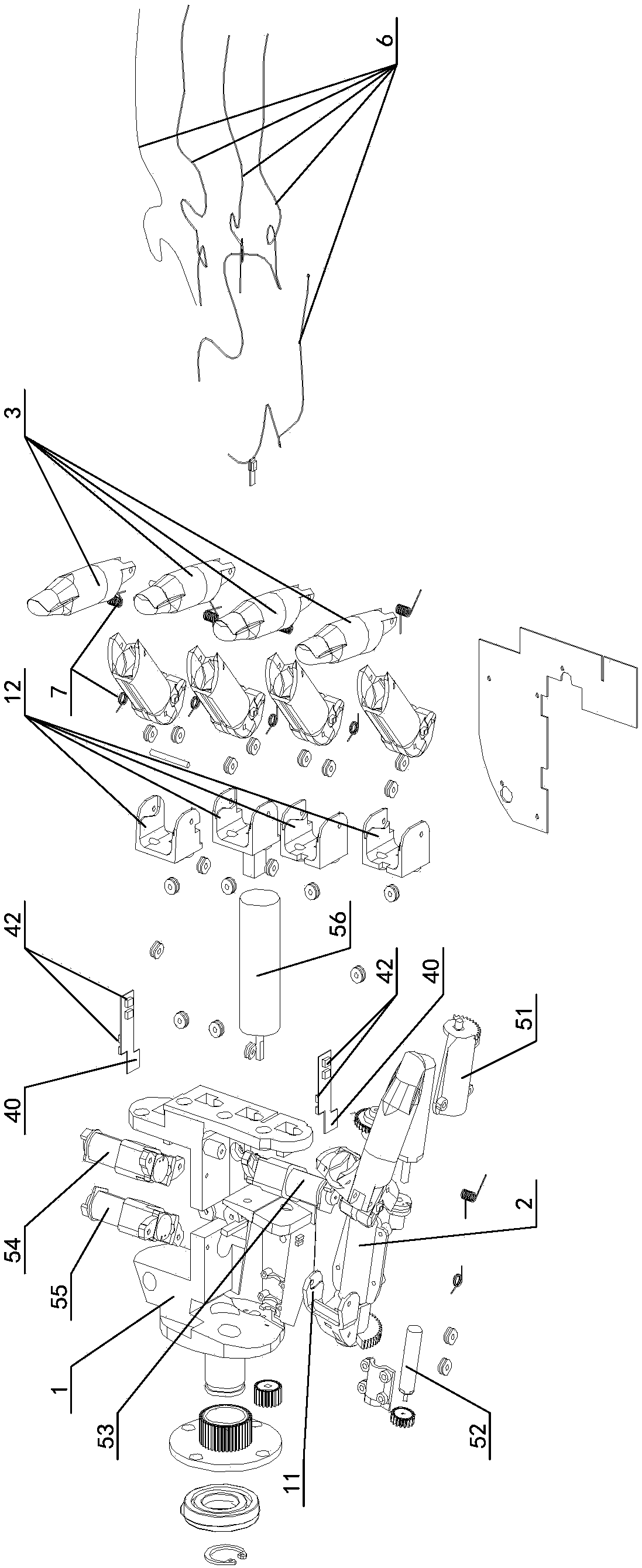
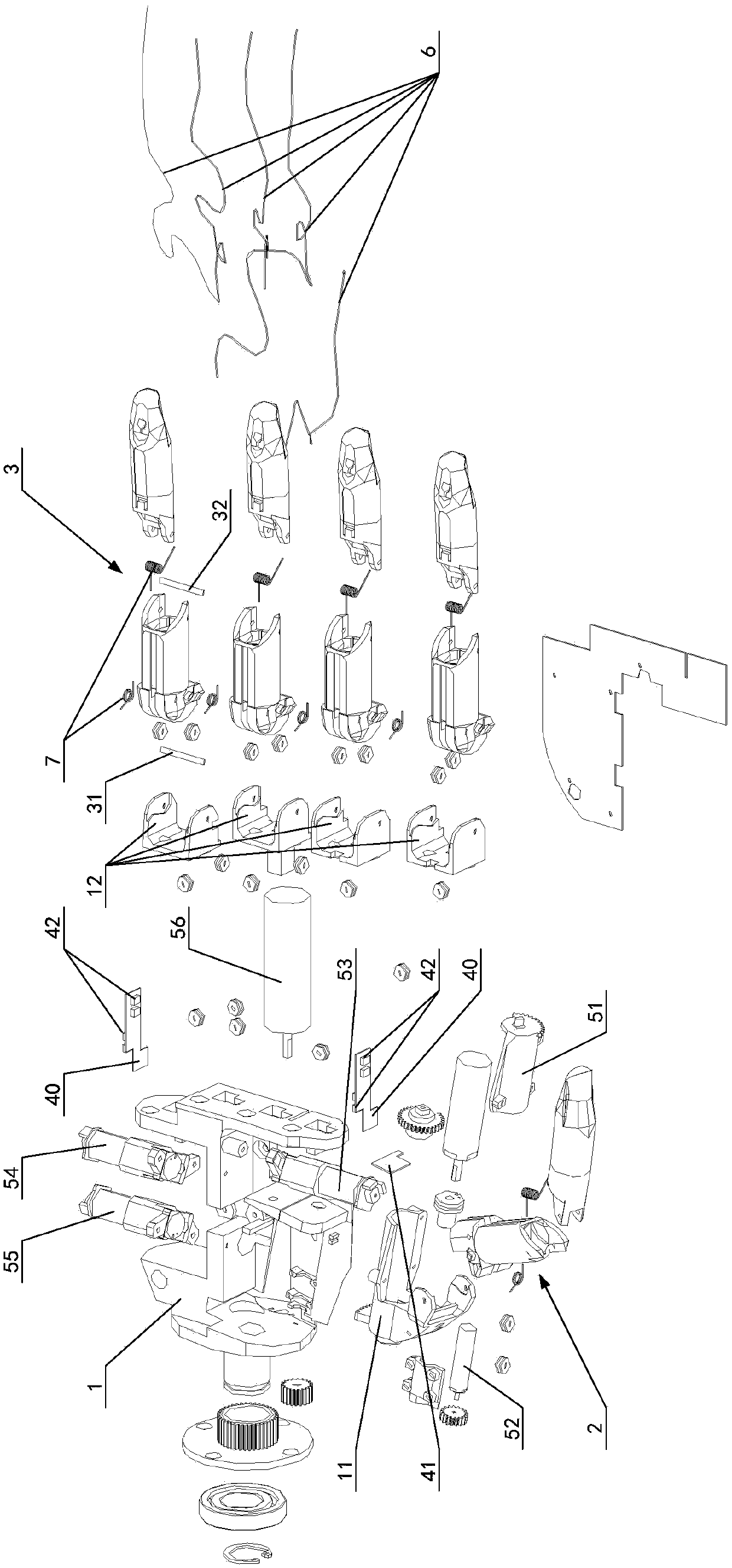
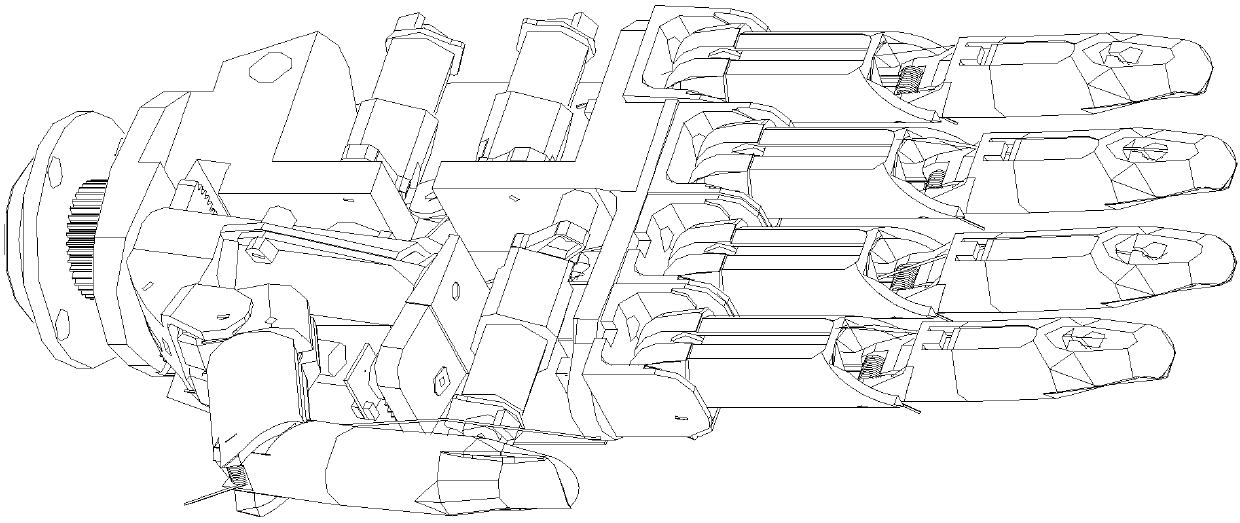
[0028] figure 1A schematic diagram of the explosive structure of the robot dexterous hand in the first state provided by the embodiment of the present invention; figure 2 A schematic diagram of the explosion structure of the robot dexterous hand in the second state provided by the embodiment of the present invention; image 3 Schematic diagram of the first perspective structure of the robot dexterous hand provided by the embodiment of the present invention; Figure 4 It is a schematic structural diagram of the robot dexterous hand provided by the embodiment of the present invention in the second viewing angle; Figure 5 A schematic diagram of the structure of four fingers in a robot dexterous...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More