

Auxiliary robot for tumor puncture of four degrees of freedom
A robot and degree-of-freedom technology, applied in the field of surgical instruments, can solve problems such as unfavorable large-scale popularization and application, complex robot system structure, inconvenient installation and maintenance, etc., to reduce the influence of human and experience factors, standardize the surgical process, and run smoothly Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments, but the present invention is not limited to these embodiments.
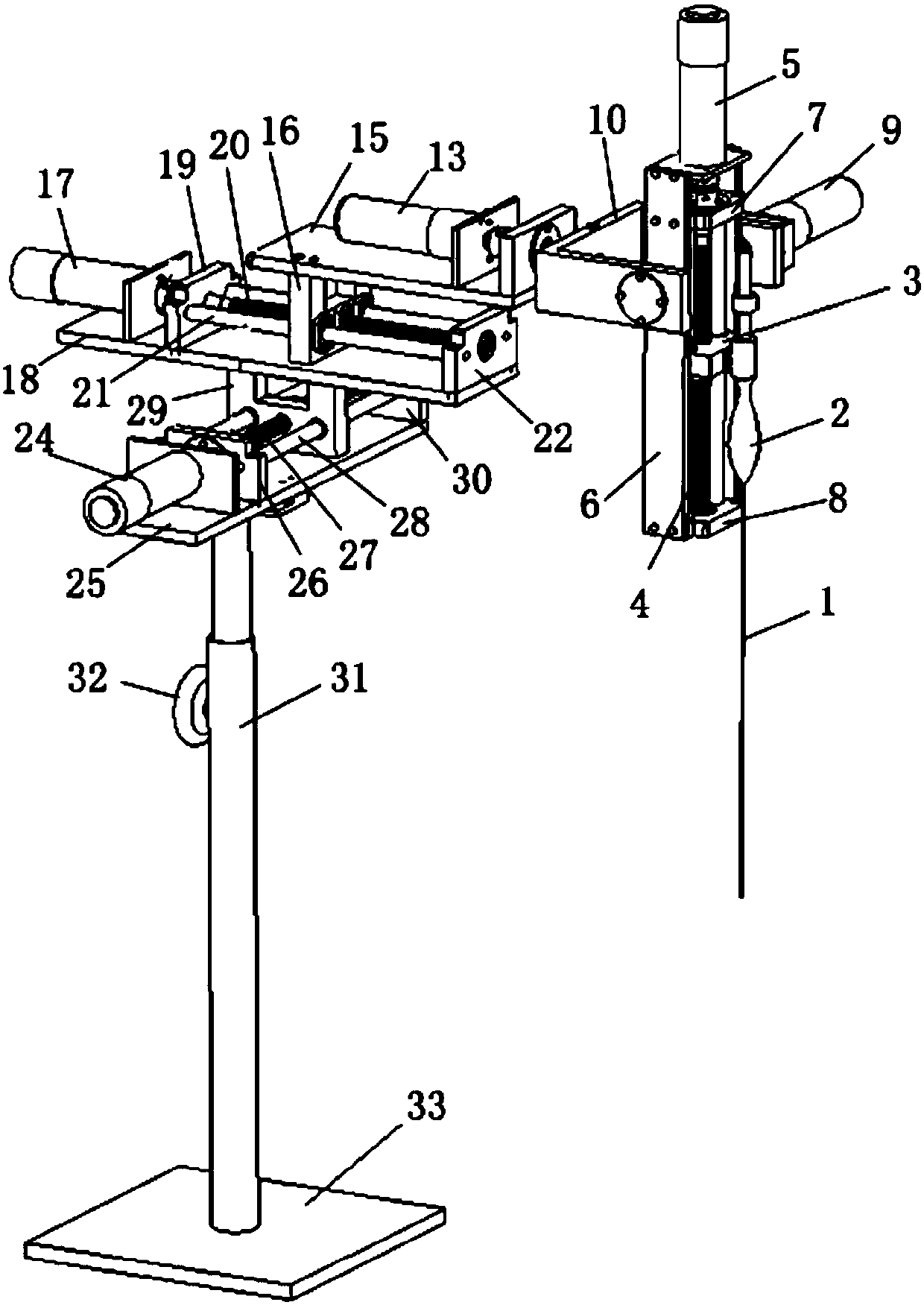
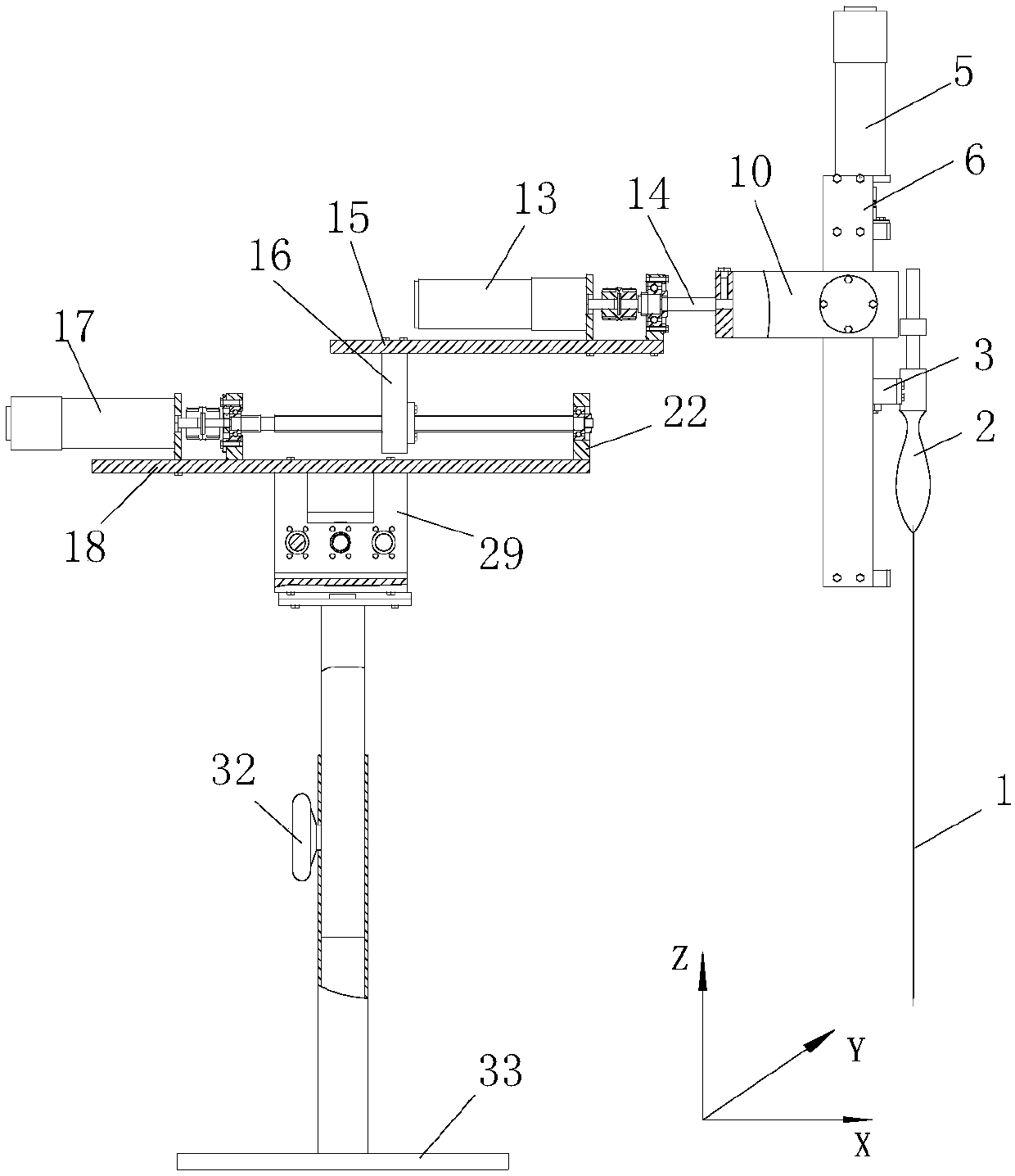
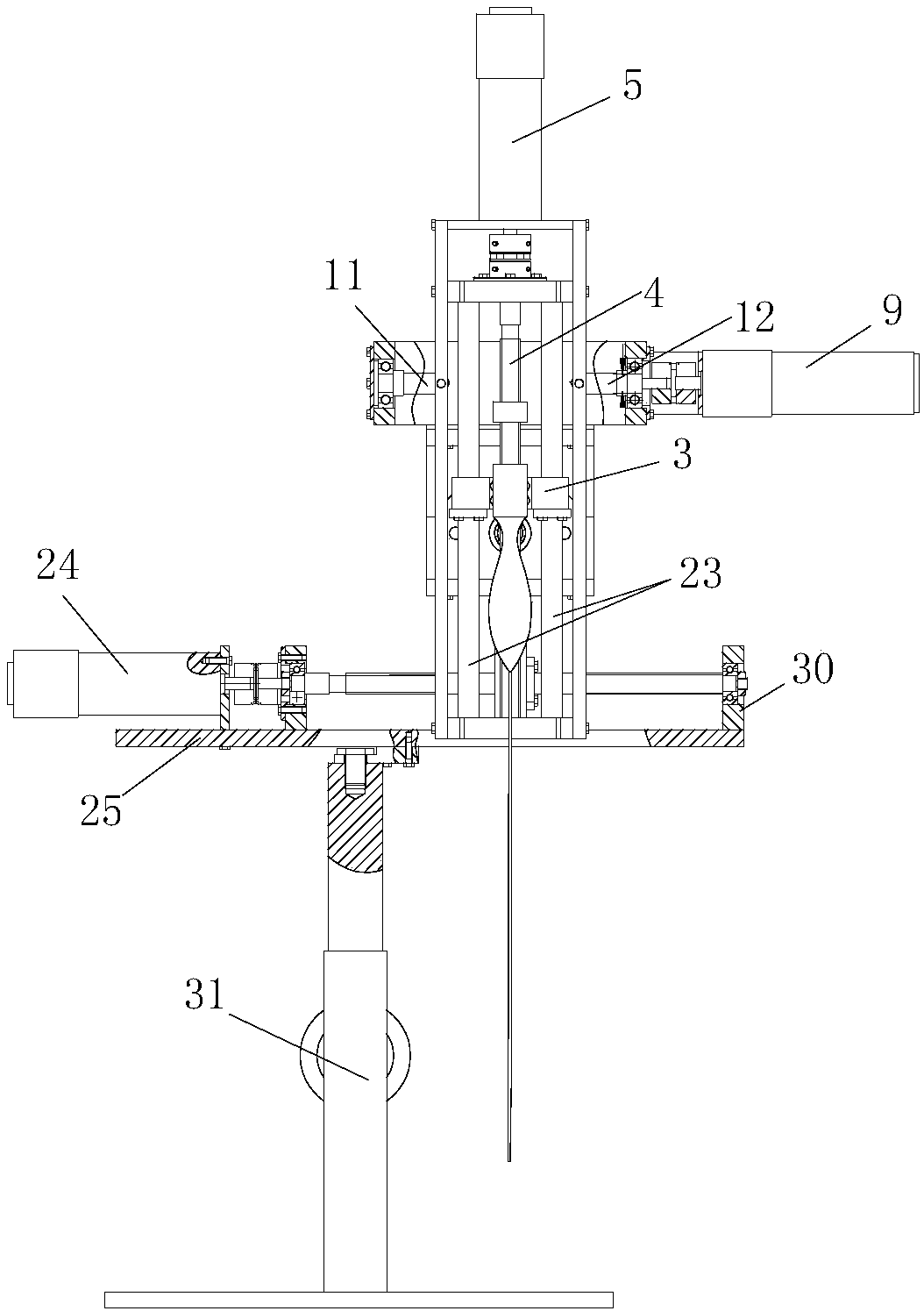
[0027] For the convenience of describing the present invention, the vertical direction is defined as the Z-axis direction, the lateral direction is defined as the X-axis direction, and the direction perpendicular to the plane formed by cooperating with the X-axis and the Z-axis is defined as the Y-axis direction.
[0028] Such as Figure 1 to Figure 4 As shown, a four-degree-of-freedom tumor puncture assisting robot includes a needle insertion device, a first swing drive device, a second swing drive device, a first translation drive device and a second translation drive device.
[0029] The needle insertion device is used to complete the puncturing action. The needle insertion device includes a needle head 1 and a needle head installation seat 2, the needle head 1 is arra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More