

Method for controlling single-rotor plant protection unmanned plane obstacle avoidance flight
A technology of plant protection drones and drones, applied in non-electric variable control, control/regulation systems, three-dimensional position/channel control, etc., can solve problems such as unfavorable popularity of plant protection drones, improve system reliability, Reduce decision-making risk and improve the effect of accurate acquisition
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
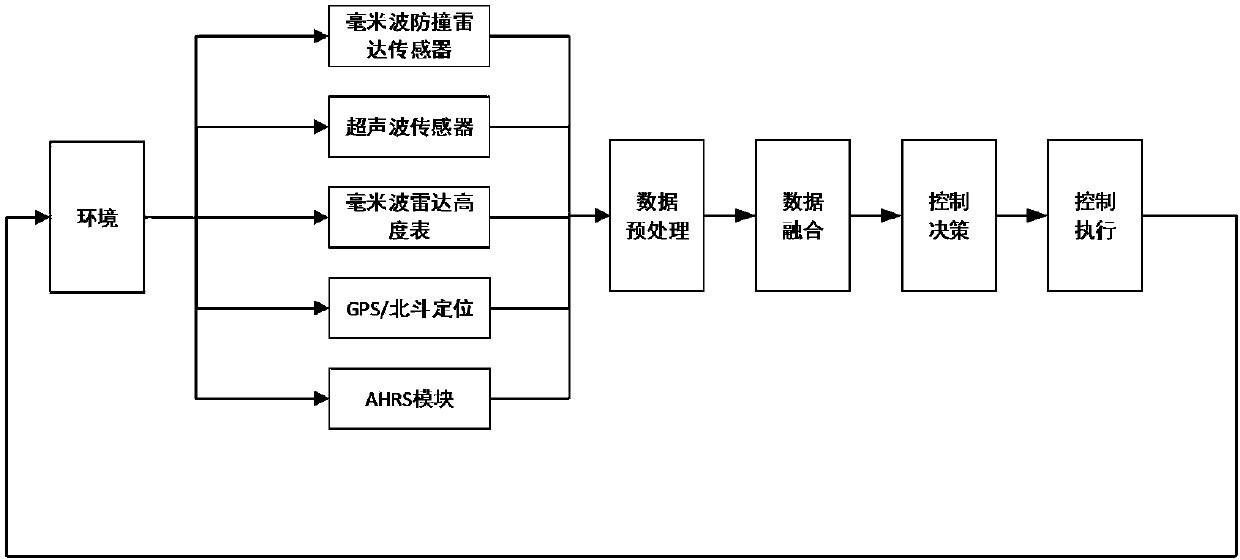
[0056] This embodiment provides a method for controlling the obstacle-avoiding flight of a single-rotor plant protection drone, including: a data collection layer, a data preprocessing layer, a data fusion layer, a decision-making layer, and a detection device;
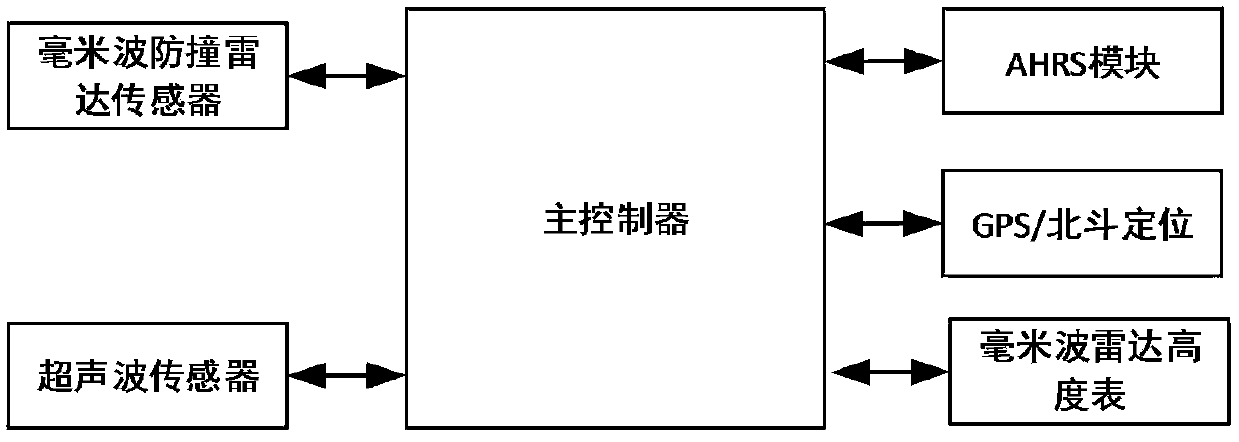
[0057] The detection device includes:
[0058] Millimeter-wave radar altimeter, which measures the relative height between the UAV and the ground;
[0059] GPS / Beidou positioning sensor, collecting positioning information, UAV altitude, UAV flight speed, etc.;
[0060] AHRS module to collect UAV flight attitude data;
[0061] The millimeter wave anti-collision radar sensor collects the relative speed, relative distance and azimuth of the UAV and the obstacle;
[0062] Ultrasonic radar sensor, used to collect the relative distance of obstacles;
[0063] The main controller controls the UAV to complete the obstacle avoidance action by analyzing the data obtained by each sensor;
[0064] The main controller is respec...
Embodiment 2
[0068] As a supplement to Embodiment 1, the data collection layer uses various sensors to collect obstacle data in the UAV flight environment:
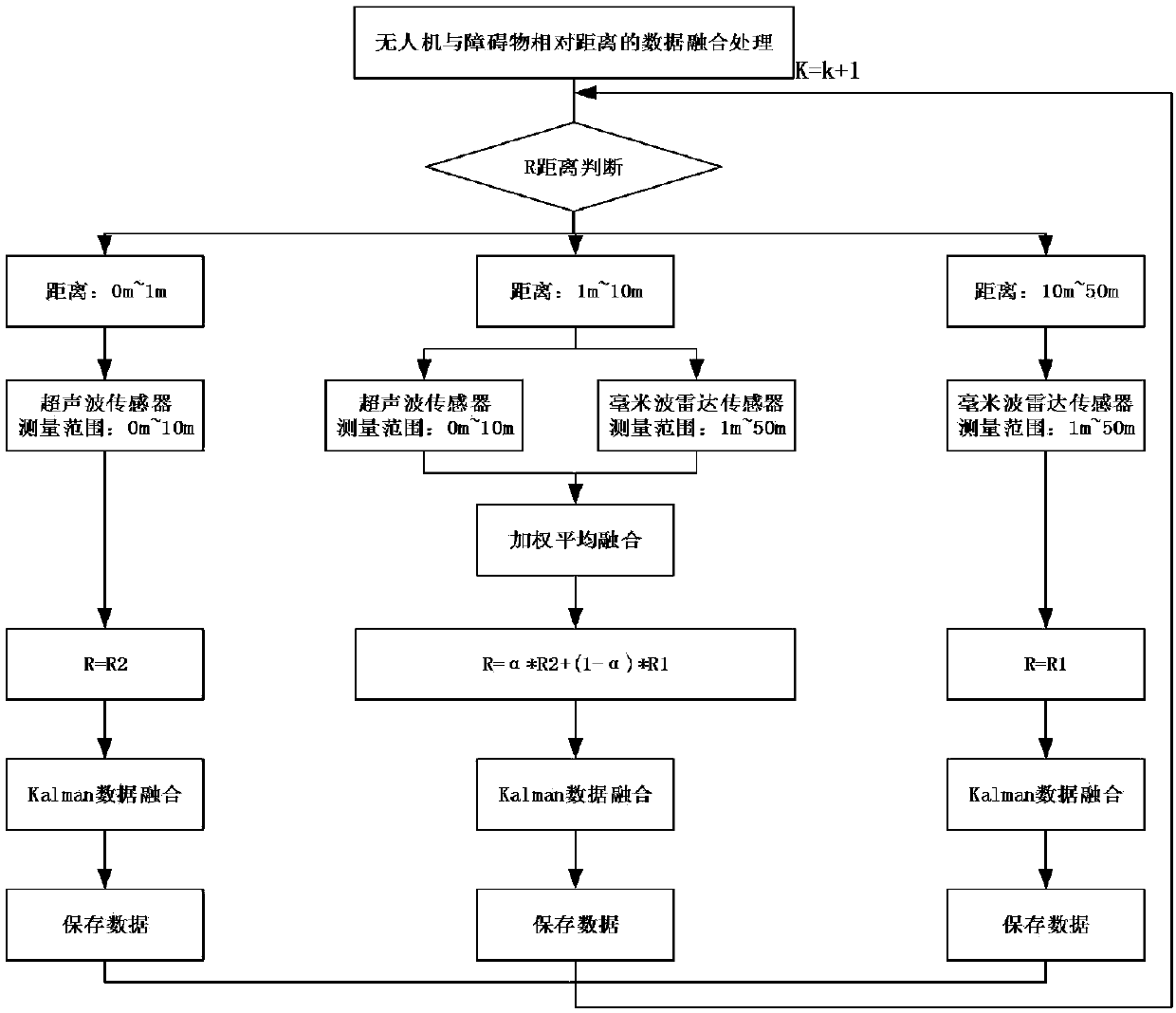
[0069] 1) The output data of the millimeter-wave anti-collision radar sensor is the relative distance R1 between the UAV and the obstacle, the relative speed V1, and the angle θ1 between the obstacle and the radar normal, namely (R1, V1, θ1);
[0070] 2) The ultrasonic sensor collects the relative distance R2 between the UAV and the obstacle;
[0071] 3) The millimeter-wave radar altimeter outputs the relative height value H1 between the UAV and the ground;
[0072] 4) The GPS / Beidou positioning sensor outputs the altitude value H2 of the UAV to the ground;
[0073] GPS data follows the NMEA0183 protocol, and the output information is standard and has a fixed format. Among them, GPGGA and GPVTG statements are closely related to UAV navigation. Their data formats are specified as follows:
[0074] (1) $GPGGA, UTC time, latitude, la...
Embodiment 3
[0079] Since data may be missing during the data collection process, and data integration and other work need to be performed in advance when subsequent data fusion processing is performed, data preprocessing and other work are required; the data preprocessing layer includes: abnormal data Two steps of processing and data missing compensation;
[0080] The existence of abnormal data will greatly affect the accuracy of prediction; therefore, a step for abnormal data processing is provided: first find out the abnormal value in the collected sensor data, and use the method of averaging the moving line to process the abnormal data; Let the abnormal data sequence be {x i ,i=1,2,Λ}, when i=n there is an outlier, then use the moving average x n Instead, use the mean value of the N data before i=n to calculate x n ;Calculated as follows:
[0081]
[0082] The loss of data will seriously affect the accuracy and continuity of subsequent data processing. In the collect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More