

Seven-degree-of-freedom force feedback hydraulic driving mechanical arm
A technology for driving machinery and force feedback, applied in the field of robotic arms, it can solve the problems of flexible working space limitations at the end, and achieve the effects of increasing flexible working space, high protection level, and large load/self-weight ratio.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
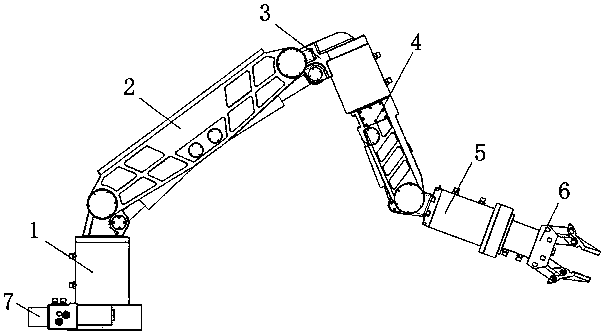
[0041] The seven-degree-of-freedom force feedback hydraulically driven mechanical arm of the present invention, such as figure 1As shown, it includes six connecting rod assemblies connected in sequence and a hydraulic control assembly 7 . The six connecting rod components are the first connecting rod assembly 1 , the second connecting rod assembly 2 , the third connecting rod assembly 3 , the fourth connecting rod assembly 4 , the fifth connecting rod assembly 5 and the sixth connecting rod assembly 6 . The six are connected sequentially through rotary joints, and each rotary joint is connected with a hydraulic cylinder, and an encoder is installed on each rotary joint; a force sensor 506 is installed on the front end of the fifth connecting rod assembly 5, and a The front end is provided with a two-finger gripper, and the fingers of the gripper are connected with a clamping oil cylinder through a link mechanism; the oil circuits of each hydraulic cylinder are connected with a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More