

Control device for omnidirectional running of Mecanum wheels
A control device, omnidirectional technology, applied in the field of robots, can solve problems such as inability to adjust, difficult to run, and difficult to stabilize the robot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the embodiments and accompanying drawings, and the contents mentioned in the embodiments are not intended to limit the present invention. The present invention will be described in detail below in conjunction with the accompanying drawings.
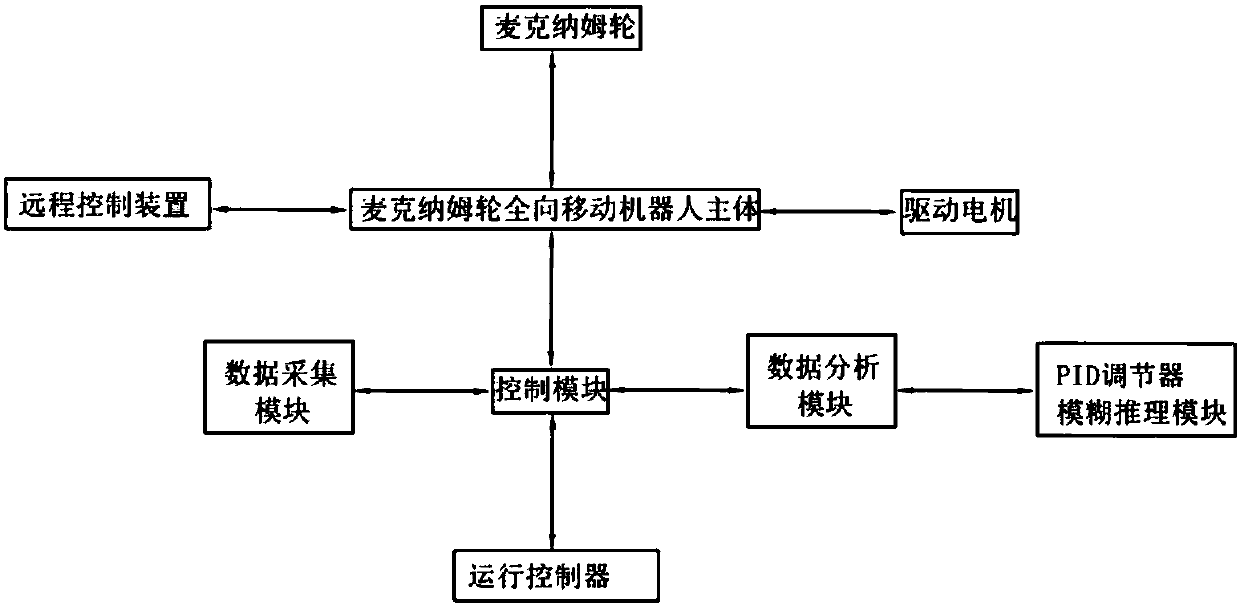
[0016] The invention provides a control device for the omnidirectional operation of mecanum wheels, which includes a mecanum wheel omnidirectional mobile robot body and a control module, and the mecanum wheel omnidirectional mobile robot body includes a drive motor, a plurality of mecanum wheel Mecanum wheels and a remote control device, the drive motors are respectively connected to a plurality of Mecanum wheels, the control module includes a data acquisition module, a data analysis module and an operation controller, the data acquisition module includes a plurality of sensors, the The dat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More