

ACC longitudinal kinematical modeling method based on relative motion relation
A technology of relative motion and modeling method, applied in geometric CAD, instrument, calculation and other directions, can solve the problems of large prediction error, inaccurate model calculation, affecting the accuracy of vehicle adaptive cruise control, etc., to improve accuracy and reduce The effect of prediction error, improving prediction accuracy and anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
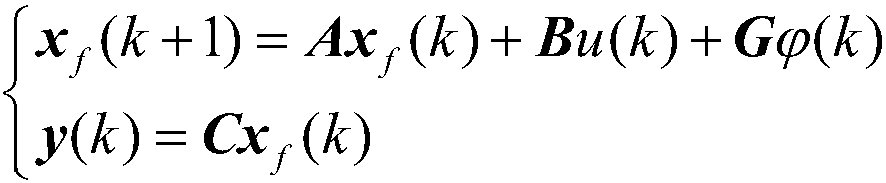
[0055] The present invention provides a kind of ACC longitudinal kinematics modeling method based on relative motion relation, specifically comprises the following steps:
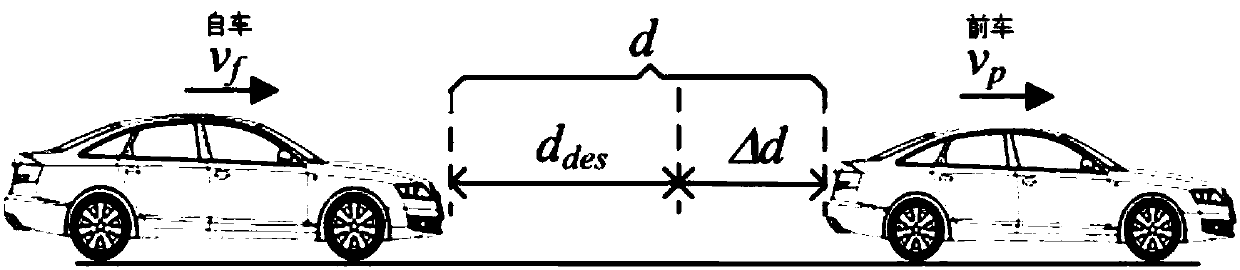
[0056] Step S1, according to the hierarchical design of the ACC system, the decision-making layer determines the desired longitudinal acceleration of the own vehicle according to the state parameters of the own vehicle, the state parameters of the preceding vehicle, and the environment parameters...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More