

A multi-angle installation type industrial handling robot
A multi-angle handling robot technology, applied in the direction of manipulators, manufacturing tools, claw arms, etc., can solve the problems of difficult heat dissipation of servo motors, low precision of cylinder transmission, and uneven clamping weight, etc., to achieve excellent results and precision High degree, increase market competitiveness and production cost, and long service life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0031]The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
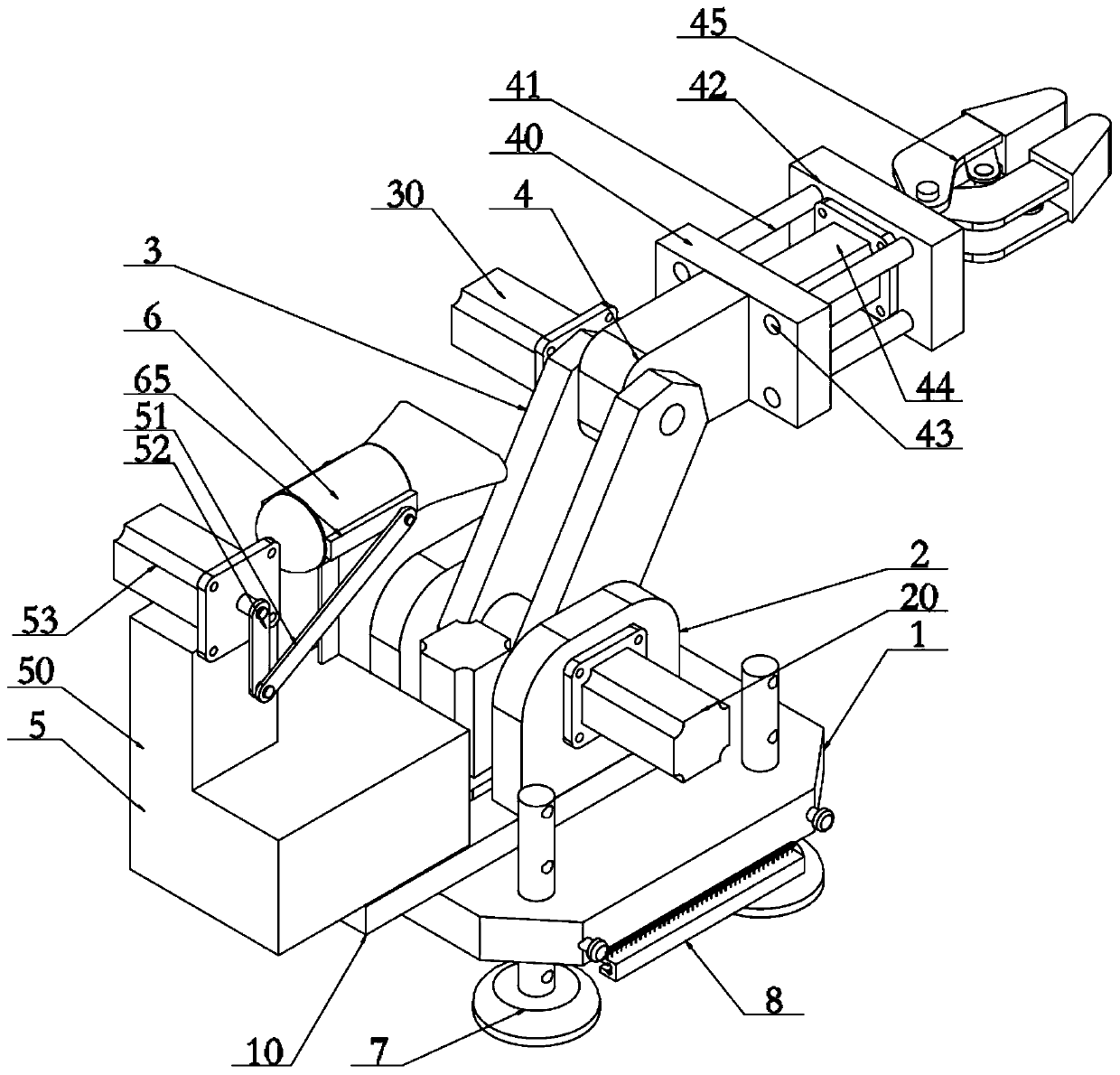
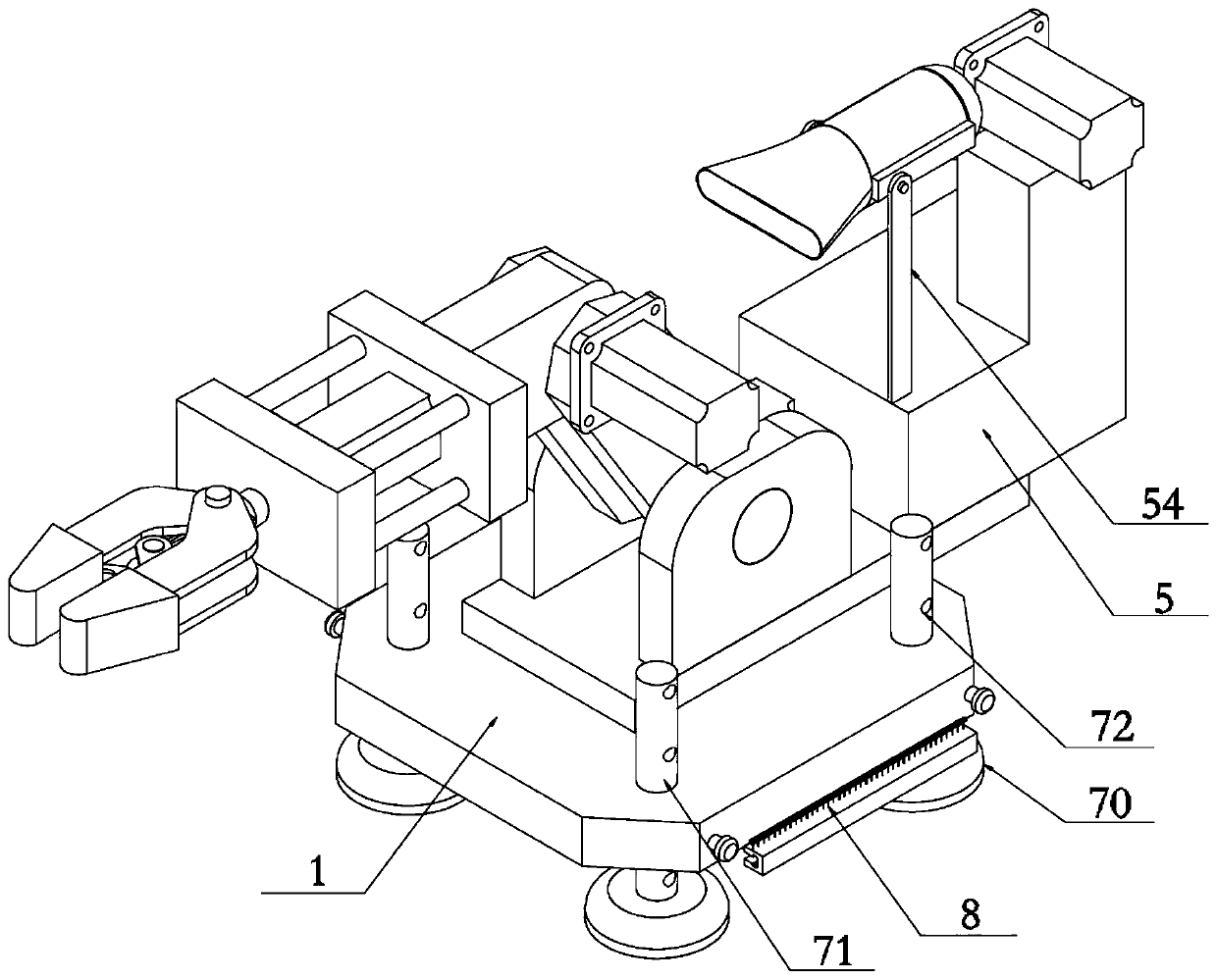
[0032] see Figure 1-9 , the present invention provides a technical solution:
[0033] A multi-angle installation type industrial handling robot, including a fixed seat 1, the surface of the fixed seat 1 is provided with a rotating seat 10, the surface of the rotating seat 10 is provided with a first servo motor 11, the output shaft of the first servo motor 11 passes through the rotating The motor shaft hole 100 on the seat 10 is coaxially provided with a pini...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More