

Lower limb rehabilitation robot
A technology for rehabilitation robots and lower limbs, applied in gymnastics equipment, muscle training equipment, passive exercise equipment, etc., can solve the problems of heavy waist burden, secondary injury, and single structure, so as to avoid secondary injury and achieve high adjustment accuracy , the effect of reducing workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
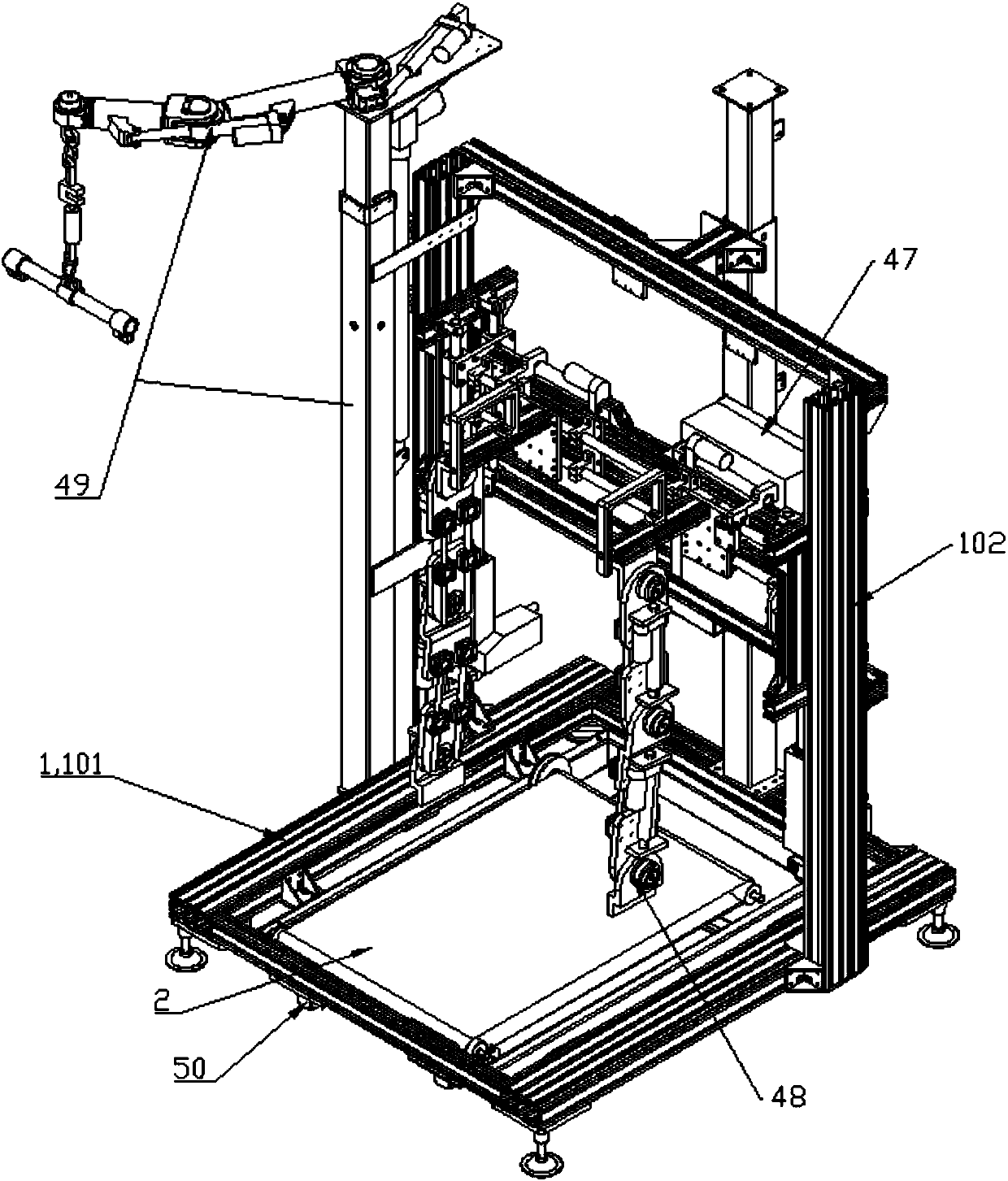
[0056] refer to Figure 1 to Figure 6 , the present invention provides a lower limb rehabilitation robot, including a frame 1, a lifting and weight-reducing mechanism 49, a mechanical leg moving mechanism, a mechanical leg moving mechanism 48, a treadmill 2 and a treadmill lifting mechanism 50;
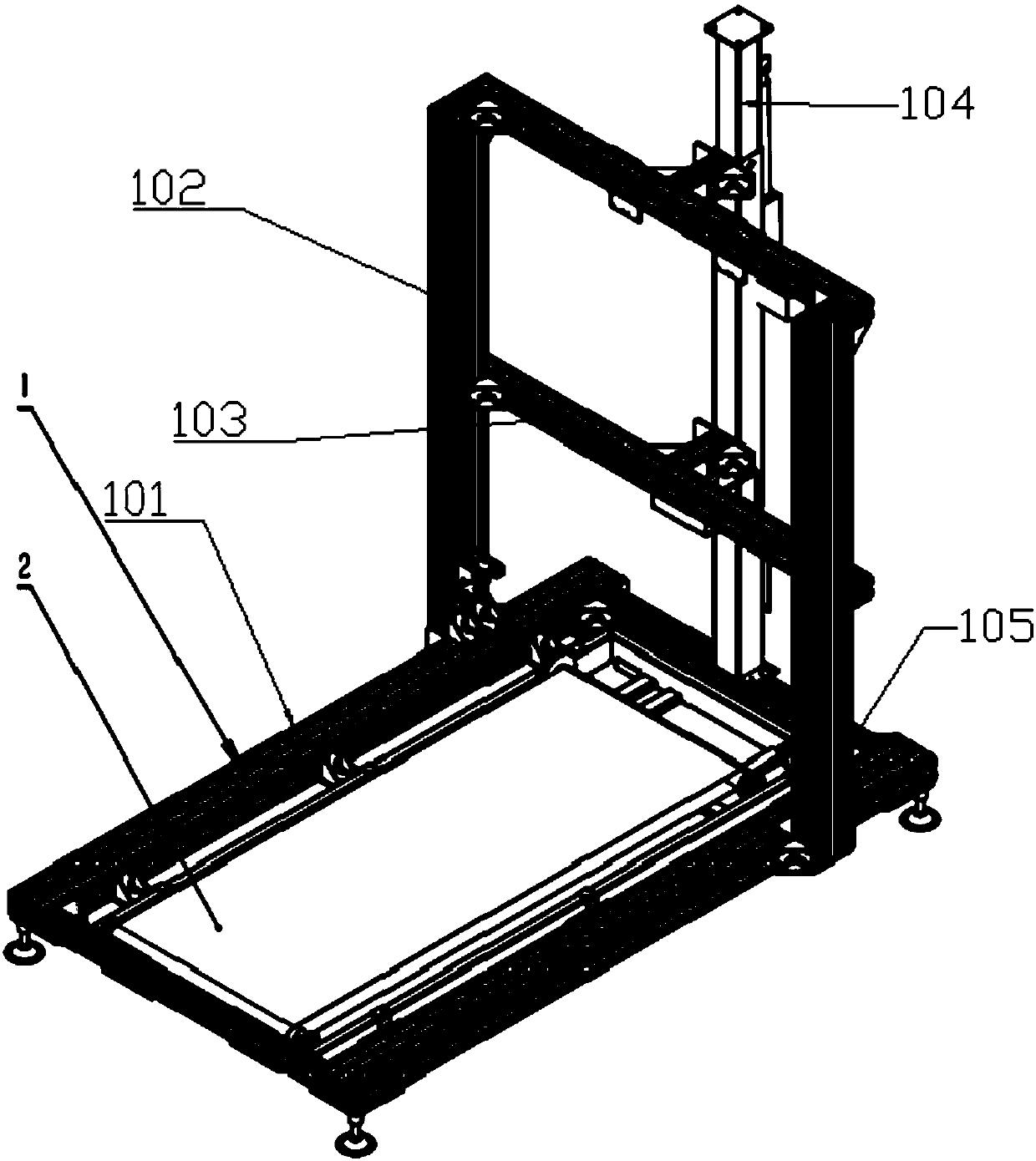
[0057] The frame 1 includes a frame bottom frame 101, a support column 102 arranged at one end of the frame, a support cross bar 103 arranged between the support posts 102, and a support vertical bar 104 arranged in the middle of the support cross bar 103; The bottom of the support vertical bar 104 is fixed on the horizontal frame 105 of the frame bottom frame 101; preferably, the support columns 102 are vertically set up on both sides of the frame bottom frame 101; between, and parallel to the horizontal frame 105; the support vertical bar 104 is set up parallel to the support column 102;
[0058] A treadmill 2 is arranged inside the frame bottom frame 101, and the treadmill lifting...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More