

Remote fixed-point self-navigation method based on visual ROS system and used for nonholonomic robot
A robot and incomplete technology, applied in the direction of navigation calculation tools, etc., to achieve the effect of reducing cumulative error, improving position accuracy, and improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The technical solutions of the present invention will be further elaborated below according to the drawings and in conjunction with the embodiments.
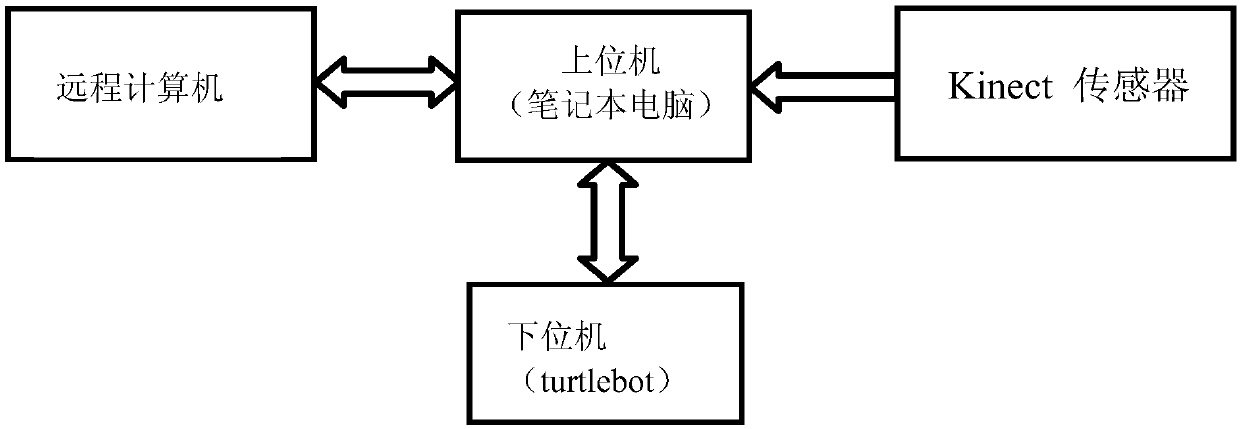
[0028] figure 1 It is the internal data flow diagram of the remote fixed-point self-navigation method of the non-complete robot based on the visual ROS system of the present invention. Two-way arrows and one-way arrows indicate that data flows in two directions and in one direction, respectively. Among them, the information exchange is carried out between the remote computer and the upper computer through the network remote desktop control, and the information exchange is carried out between the upper computer and the lower computer through Socket communication. The lower computer of the robot is used to calculate the actual speed of the current robot, and transmit the speed data to the upper computer. The host computer decides the movement speed of the robot according to the sensor data in the Kinect camera and the dat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More