

Unmanned aerial vehicle small target detection method based on motion features and deep learning features
A technology of small target detection and deep learning, applied in the field of small target detection of drones, can solve problems such as small size and difficult detection of drones
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] Hereinafter, the preferred embodiments of the present invention will be described in detail with reference to the accompanying drawings.
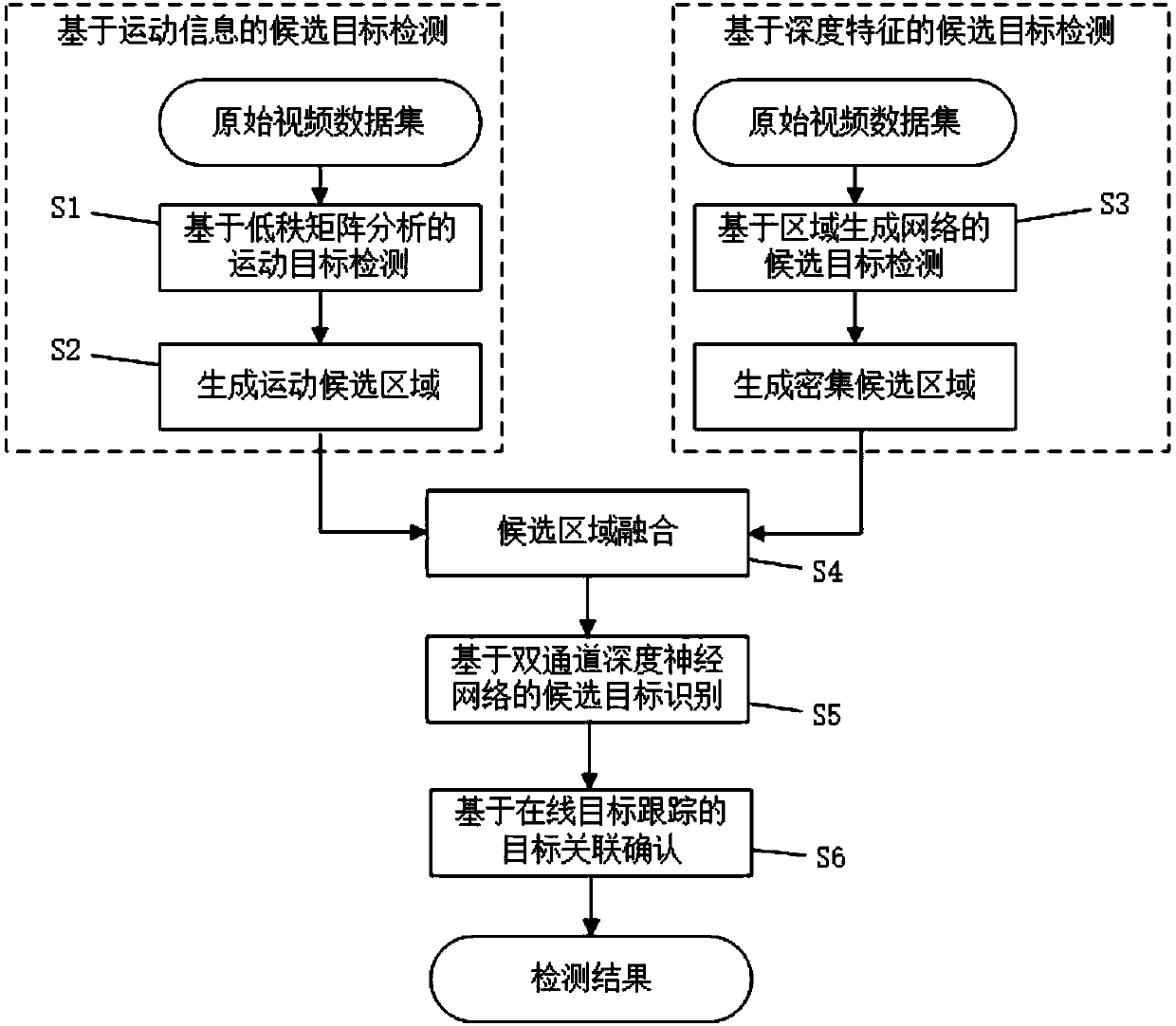
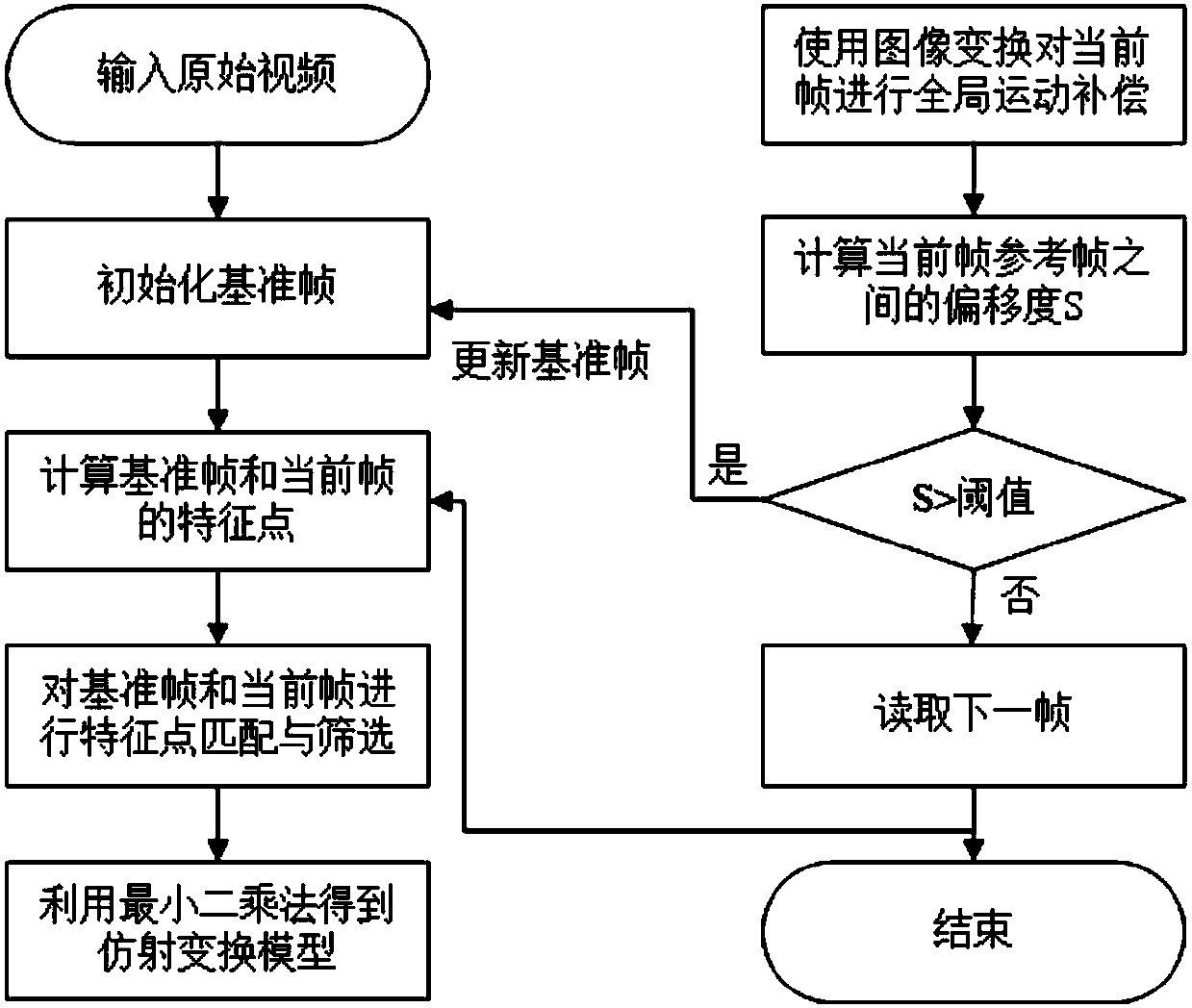
[0078] In the present invention, the candidate target detection module based on motion characteristics performs video image stabilization on the original video, and then extracts the motion target region in the video through low-rank matrix analysis;
[0079] Candidate target detection module based on depth features, and extract candidate targets from video images through an improved region generation network model;
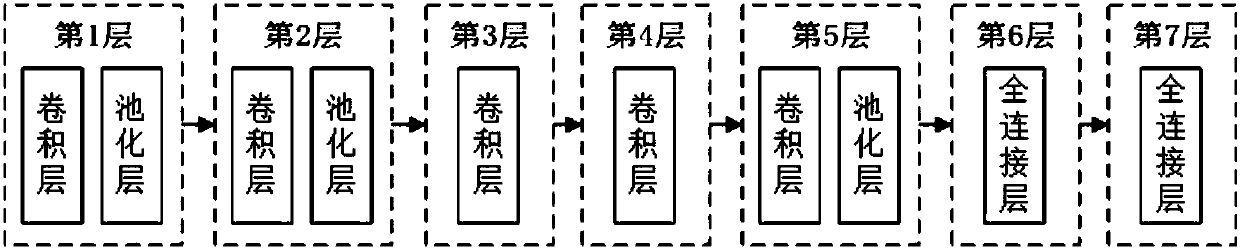
[0080] The improved candidate region generation network is to modify the network structure and the scale of the candidate region on the basis of the traditional region generation network, and replace the network layer of the output feature map;
[0081] The candidate region fusion module is to fuse the candidate regions obtained in steps S2 and S3;
[0082] The candidate target recognition module of the dual-channel deep neural n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More