

Driving and control integrated system of robot joints
A technology of robot joint and drive control, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of unable to directly provide absolute spatial pose, unable to detect joint temperature state, etc., to achieve the effect of rapid exchange
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
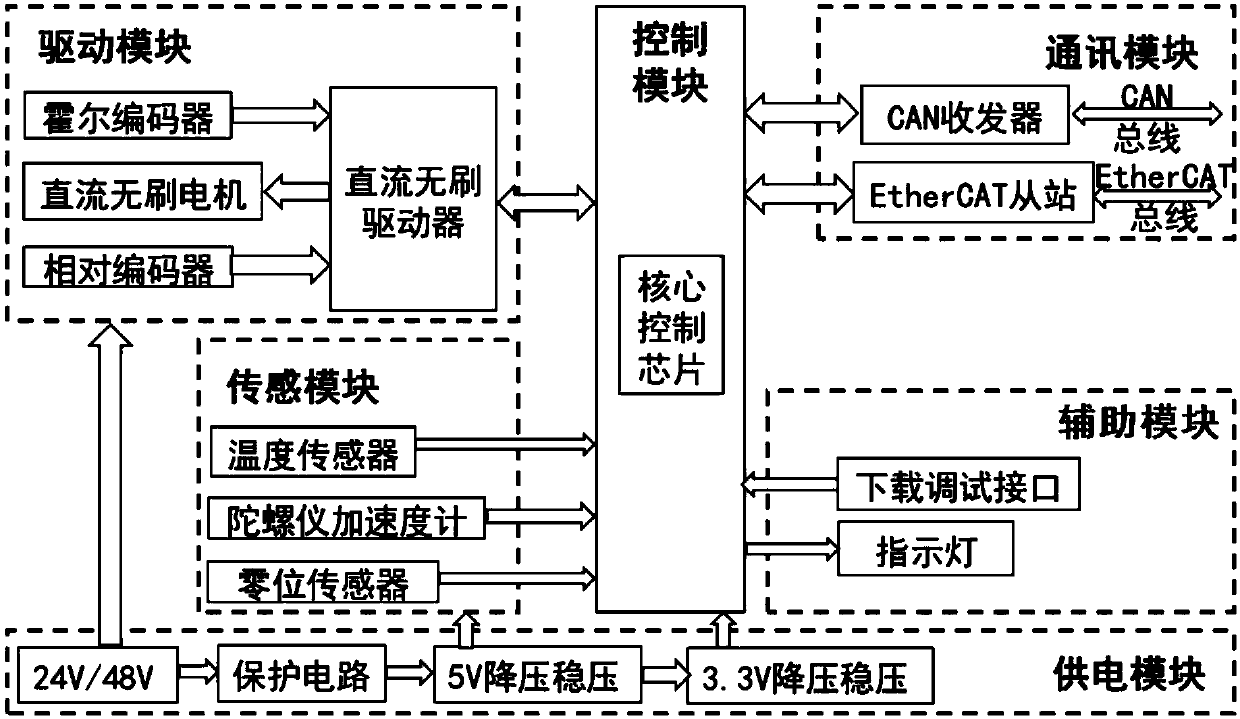
[0016] Such as figure 1 As shown, it is an integrated system for driving and controlling robot joints involved in this embodiment, including: a control module, a driving module, a sensing module and a communication module, wherein: the control module communicates with the driving module through an analog interface and a digital interface Connected, output the motion control command of the motor of the robot joint to the drive module, receive the motor current signal from the drive module, the encoder pulse information and obtain the current speed and acceleration signal of the motor; the sensor module collects the sensor data in the robot joint and feeds back to the control module; the communication module uploads the sensor data, motion control commands and motor motion status data to the host computer through the bus, and downloads the control commands sent from the host computer to the robot joint control module from the bus. From the communication control mode, the exchang...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More