

Video-based unmanned aerial vehicle cloud online traffic flow monitoring method
A traffic flow and unmanned aerial vehicle technology, applied in the field of traffic flow monitoring, real-time moving target classification and detection, can solve the problems of high time complexity, poor robustness, short communication distance, etc., to achieve remote data transmission, improve Robust, distance-independent effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
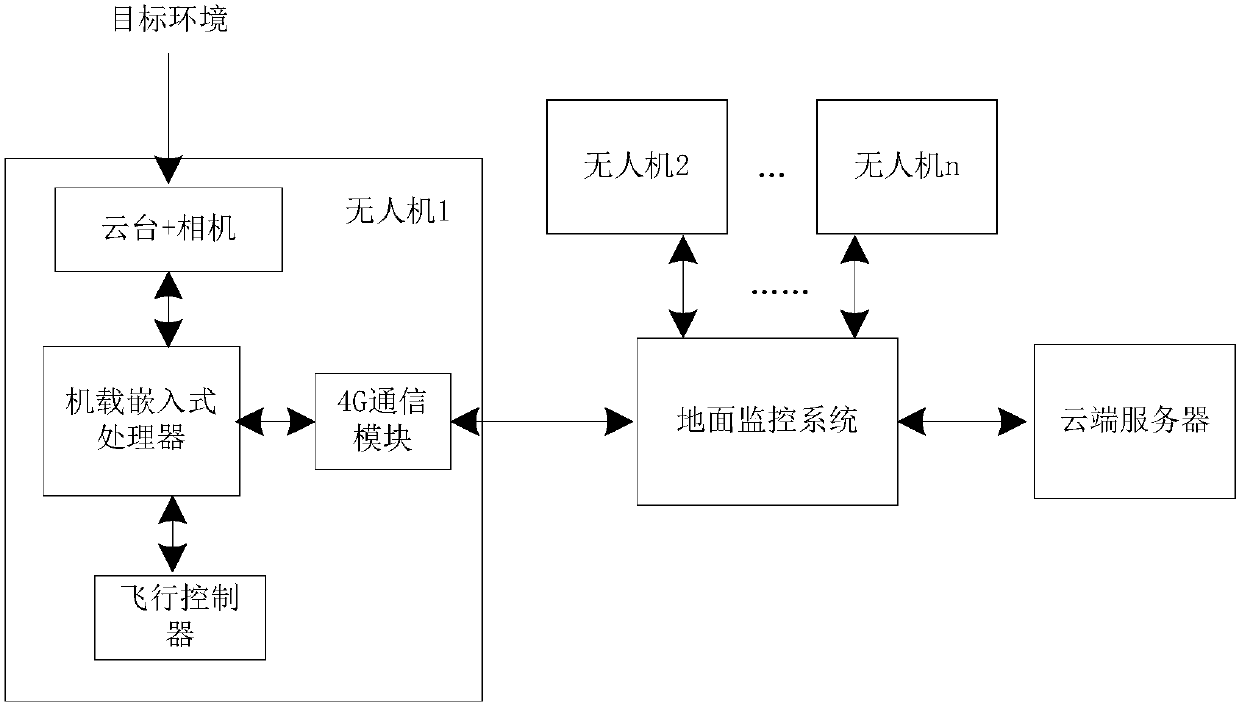
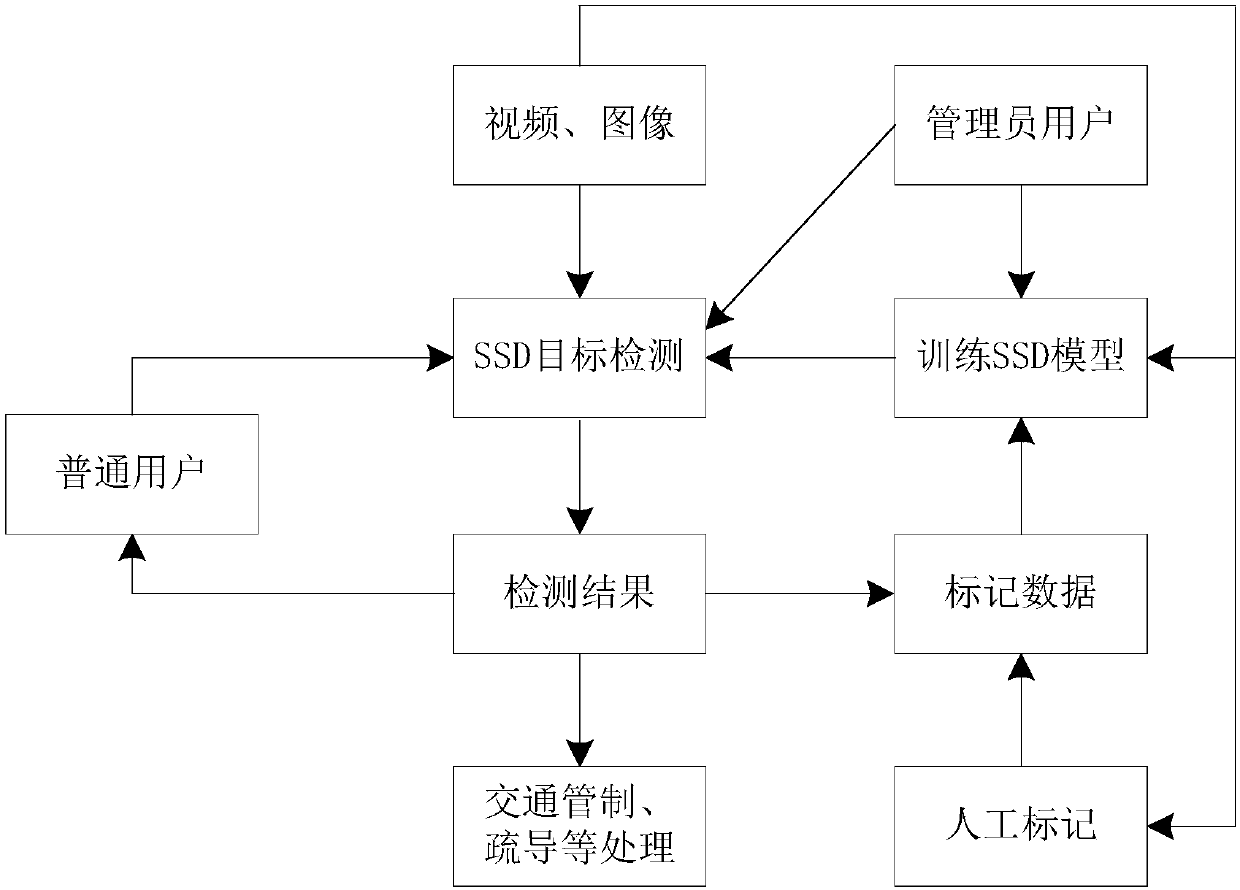
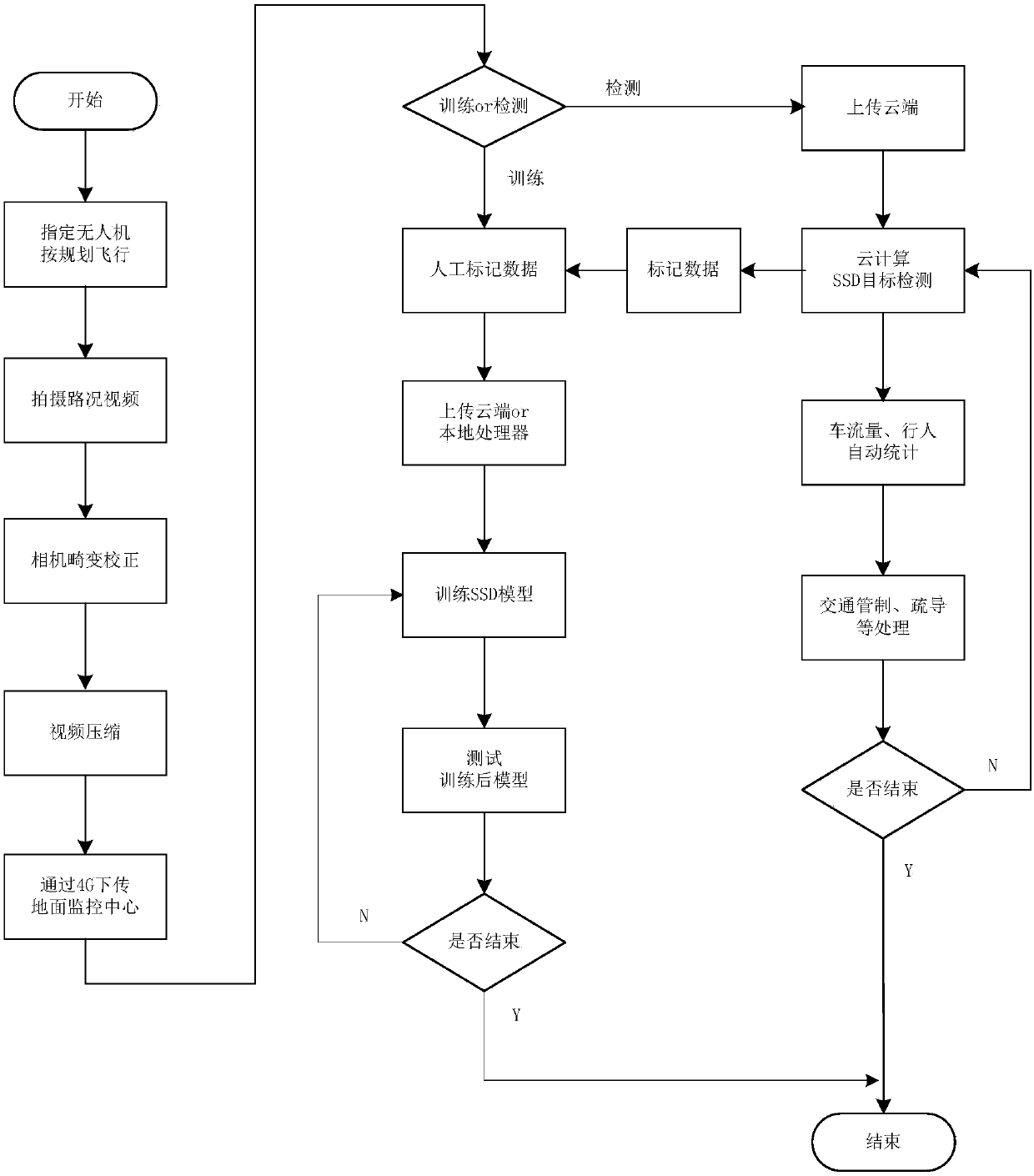
[0058] Such as figure 1 As shown, the UAV system mainly includes UAVs with gimbals, cameras, flight controllers, onboard embedded processors and 4G communication modules, ground monitoring systems, and cloud servers with powerful computing capabilities. The UAV shoots the required motor traffic video, and after the distortion correction and compression processing of the UAV on-board processor, the 4G communication module overcomes the distance limitation, and remotely transmits it to the ground monitoring center for centralized processing; to further improve wireless Human-machine automation; after the ground monitoring center receives the video, it uses the cloud computing capability of the cloud server to monitor the road condition video and count the traffic information of pedestrians and vehicles for subsequent maneuvering by using the target detection SSD algorithm based on deep learning and training Provide important references for handling measures such as traffic contr...
Embodiment 2
[0073] In this embodiment, multiple drones work together through the 4G communication module, and multiple drones shoot the required motor traffic video, and then after distortion correction and compression processing by the drone's on-board processor, they pass The communication module overcomes the distance limitation, and remotely transmits to the ground monitoring center for centralized processing.
[0074] Other parts are the same as in Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More