

Sliding mode control method and controller for four-rotor aircraft
A quadrotor aircraft and control method technology, applied in the field of aircraft, can solve problems such as nonlinear strong coupling, unknown parameters, and not suitable for nonlinear systems of quadrotor aircraft
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] The technical solution in this application will be described below with reference to the accompanying drawings.
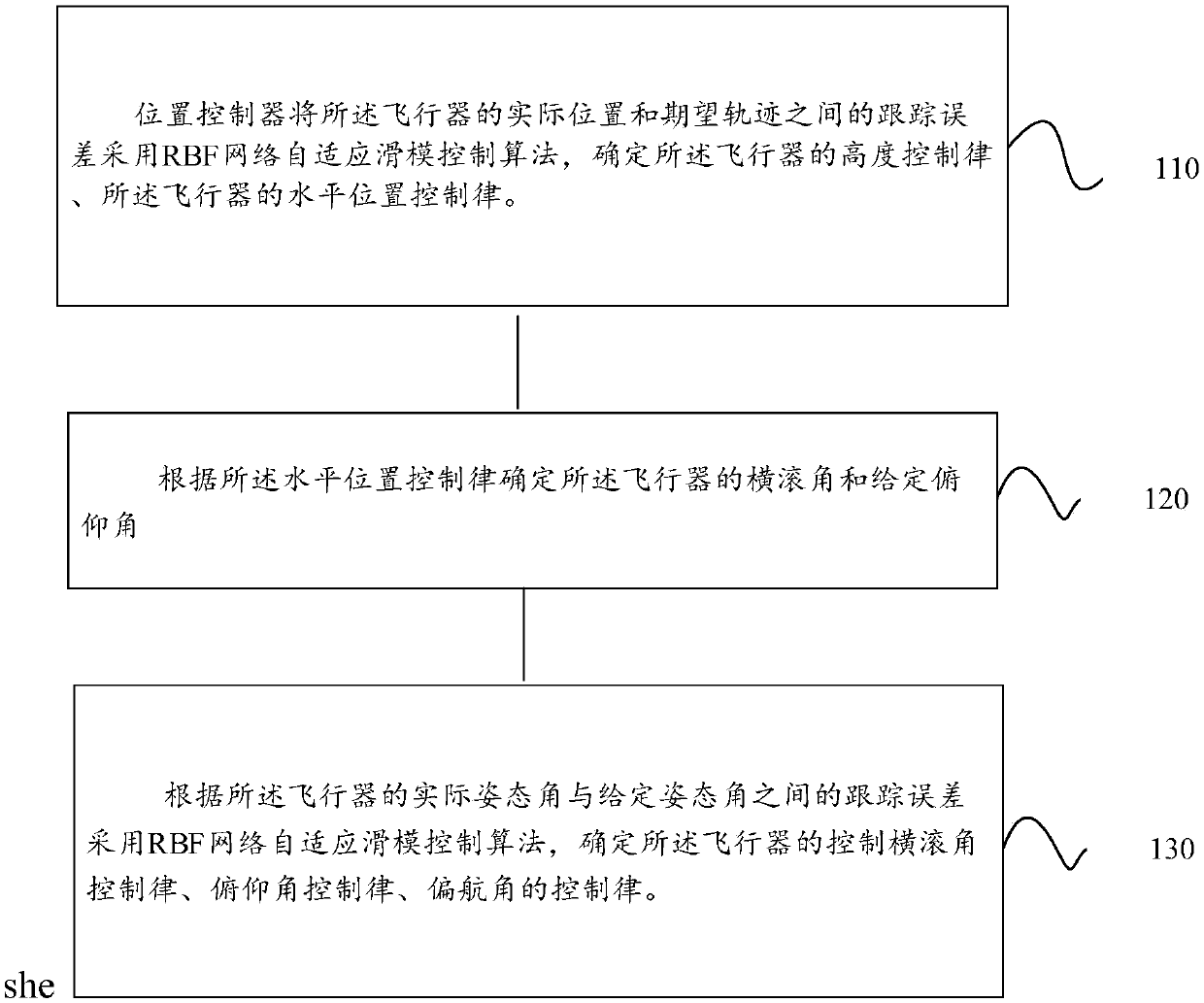
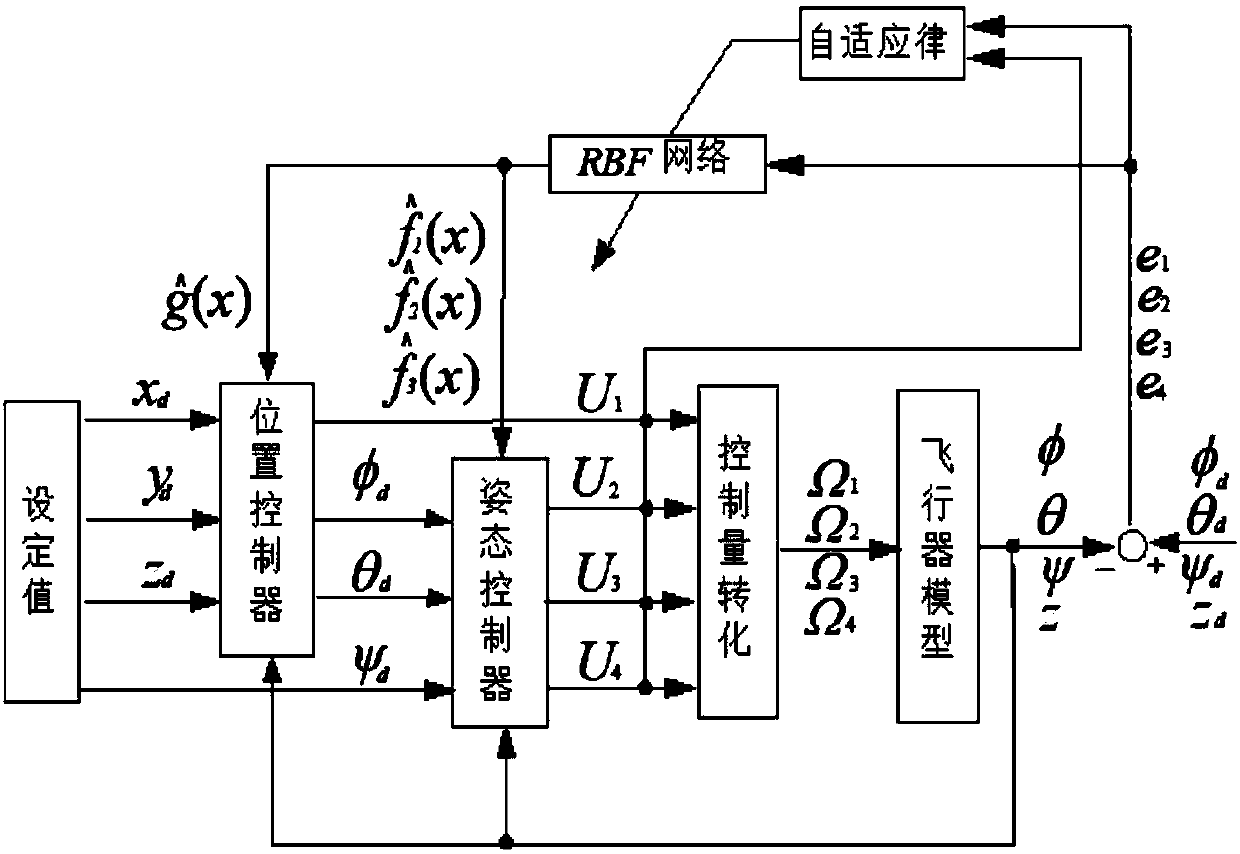
[0084] figure 1 A schematic flow chart showing a method of an embodiment of the present application, such as figure 1 As shown, the aircraft in the method is controlled by a controller, and the controller is a sub-loop control structure, the outer ring of the sub-loop control structure is a position controller, and the method includes:
[0085] Step 110, the position controller sends the actual position x, y, z of the aircraft and the expected trajectory x d 、y d ,z d The tracking error between adopts the RBF network adaptive sliding mode control algorithm to determine the altitude control law U of the aircraft 1 , the horizontal position control law U of the aircraft x , U y .
[0086] Step 120, according to the horizontal position control law U x , U y Determine the roll angle φ of the aircraft d and a given pitch angle θ d .
[0087] Step 130,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More