

Circular array modal domain orientation estimation method based on space sparse constraint
A technology of sparse constraints and orientation estimation, which is applied to systems for determining direction or offset, and direction finders using ultrasonic/sonic/infrasonic waves. It can solve problems such as low accuracy, low algorithm execution efficiency, and long prediction time. Achieve good position estimation performance, reduce computational complexity, and improve resolution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
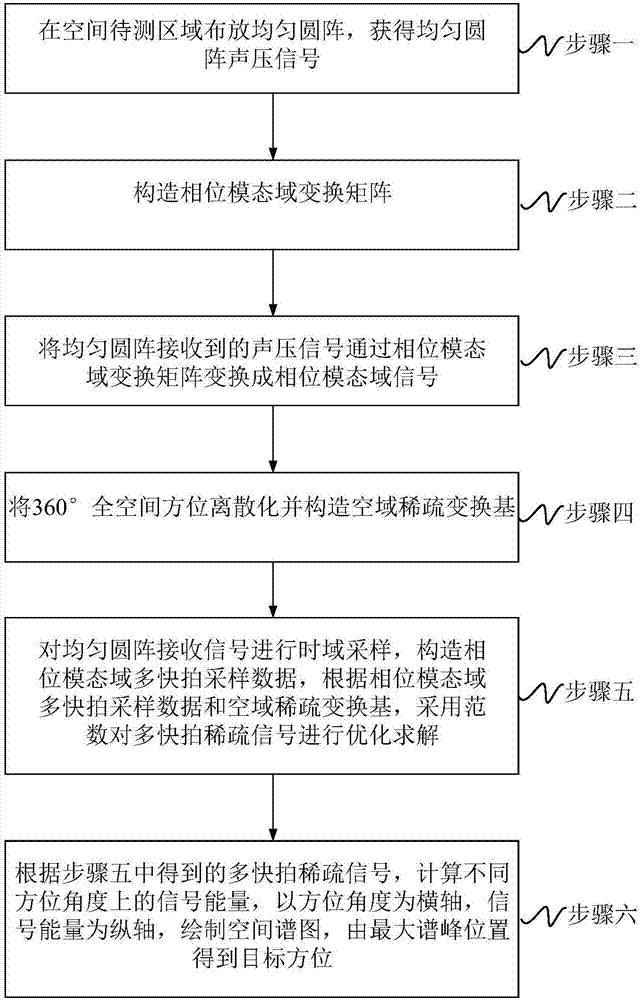
[0017] Specific implementation mode 1: The circular array modal domain orientation estimation method based on spatial sparse constraints in this implementation mode, such as figure 1 shown, including:
[0018] Step 1. Arrange a uniform circular array in the area to be measured in space to obtain a uniform circular array sound pressure signal P(t);
[0019] Step 2. Construct the phase modal domain transformation matrix T;
[0020] Step 3, transforming the sound pressure signal P(t) received by the uniform circular array into a phase modal domain signal X(t) through the phase modal domain transformation matrix T;
[0021] Step 4. Discretize the 360° full spatial orientation, and construct the spatial sparse transformation base
[0022] Step 5: Sampling the received signal of the uniform circular array in the time domain, constructing multi-snapshot sampling data X in the phase modal domain, according to the multi-snapshot sampling data X in the phase modal domain and the spa...
specific Embodiment approach 2
[0024] Specific implementation mode two: the difference between this implementation mode and specific implementation mode one is that step one is specifically:
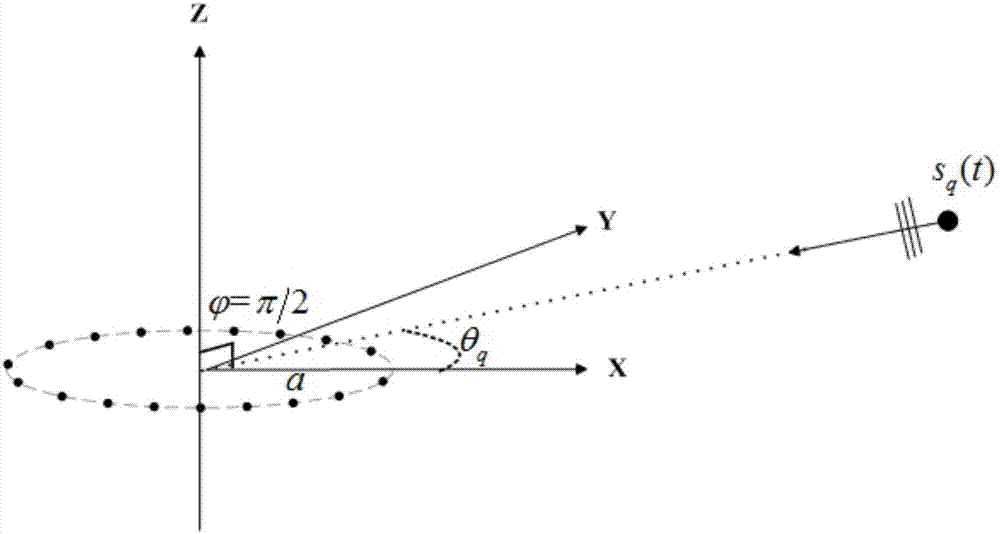
[0025] Place an N-element uniform circular array with a radius a in the horizontal x-y plane, and assume that there are Q narrowband signals s in the space q (t)(q=1,...,Q) and located on the same plane as the uniform circular array, the incident angles are θ q (q=1,...,Q), such as figure 2 shown.
[0026] Then the sound pressure signal received by the nth array element can be expressed as:
[0027]
[0028] in, is the wave number, f is the signal frequency, c is the speed of sound; M is the maximum number of phase modes that can be excited by the circular array, and the value is the smallest integer greater than ka; is the imaginary unit; J m (·) is an m-order Bessel function; e is a mathematical constant.
[0029] Further, the sound pressure signal P(t) received by the uniform circular array can be expre...
specific Embodiment approach 3
[0040] Specific implementation mode three: the difference between this implementation mode and specific implementation mode one or two is that step two is specifically:
[0041] The transfer function diagonal matrix B is inverted, then multiplied by the complex conjugate transpose of the spatial Fourier transform matrix F, and finally divided by the number of array elements N, the phase modal domain transformation matrix T is constructed, namely
[0042]
[0043] in,(·) -1 Indicates the matrix inversion operation, ( ) H Represents the complex conjugate transpose of a matrix.
[0044] Other steps and parameters are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More